Knowledge Base
Blog
Chia sẻ kiến thức về Robotics, AI & Tự động hóa
Bài Mới Nhất
Học theo Series
cuRobo trên Jetson AGX Orin và Unitree G1
· 10 phần
Phần 1/10
cuRobo trên Jetson AGX Orin 64GB và Unitree G1: lộ trình 10 bài
5 phút đọc

Phần 2/10
Cài cuRoboV2 trên Jetson AGX Orin 64GB: môi trường, CUDA và kiểm tra
5 phút đọc

Phần 3/10
Build robot model cho cuRobo: URDF, collision spheres và self-collision
3 phút đọc

Phần 4/10
FK và IK trong cuRobo: kiểm tra frame, quaternion và joint order
3 phút đọc

Phần 5/10
Motion planning và grasp với cuRobo: obstacle, seed và trajectory
3 phút đọc

Phần 6/10
ROS 2 bridge cho cuRobo trên Jetson: từ goal pose tới JointTrajectory
2 phút đọc

Phần 7/10
Scene mapping cho cuRobo: depth camera, TSDF/ESDF và obstacle snapshot
3 phút đọc

Phần 8/10
Unitree G1 arm-only với cuRobo: điều khiển tay mà không phá balance
3 phút đọc

Phần 9/10
Unitree G1 whole-body với cuRobo: floating base, tool frames và retargeting
4 phút đọc

Phần 10/10
Deploy cuRobo lên robot thật: checklist, issue hiện tại và rollback
5 phút đọc
Ai Manipulation Agents
· 5 phần
Phần 1/5
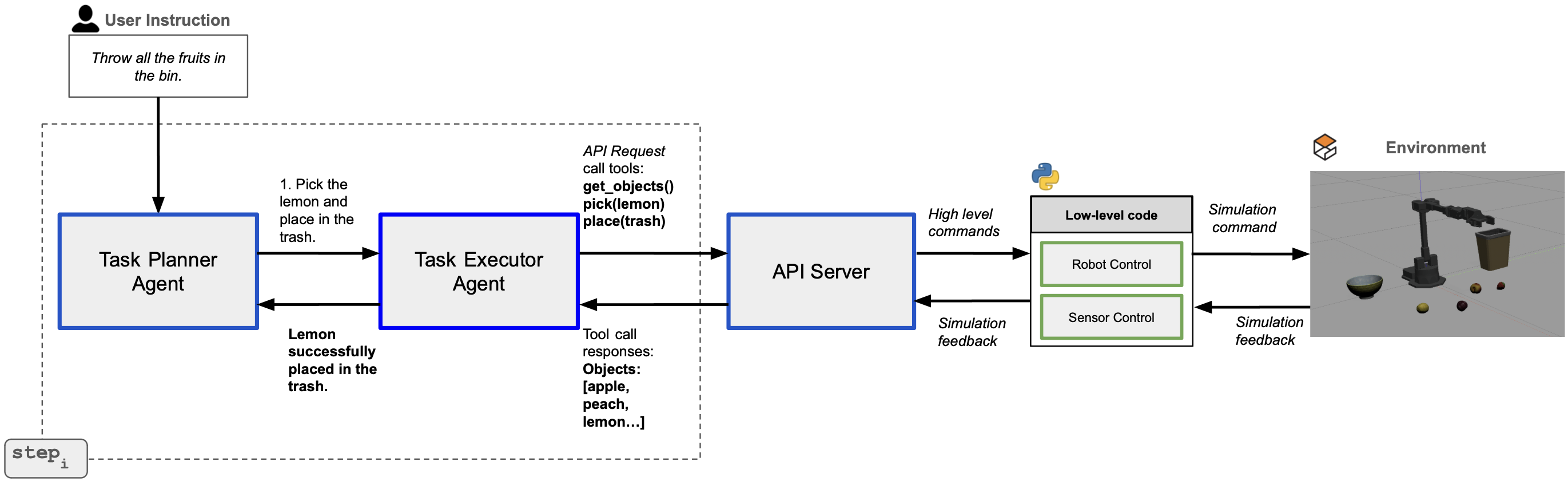
Tại sao Multi-Agent đánh bại VLA đơn thuần? | AI Manipulation Agents #1
13 phút đọc
Phần 2/5
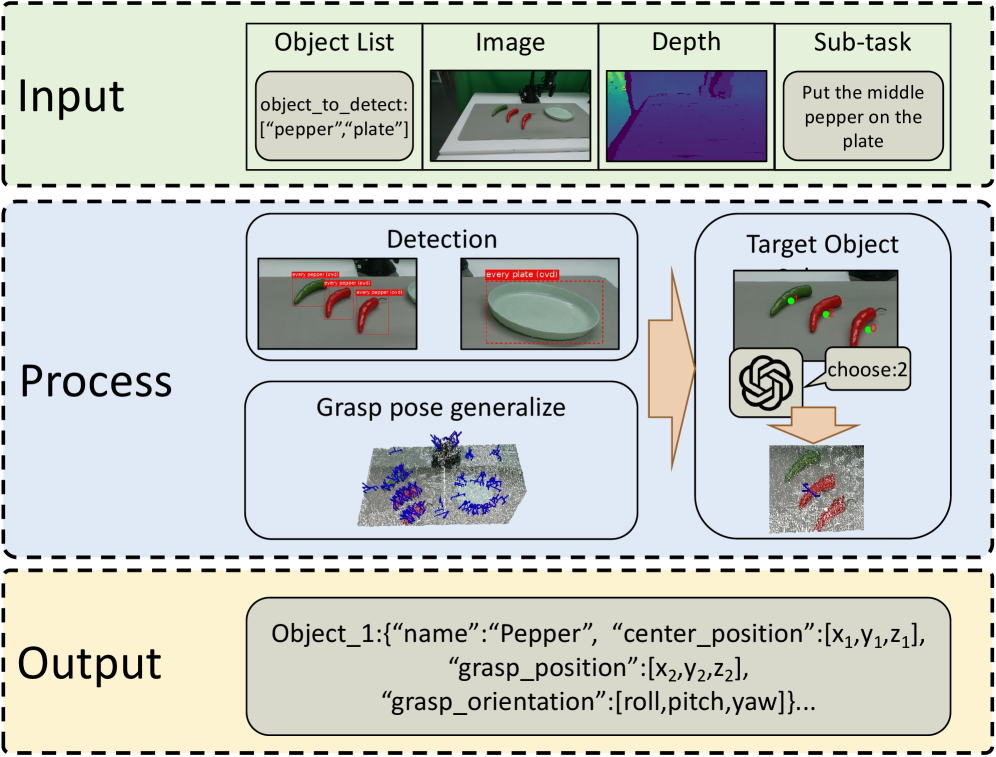
Perception Agent: Florence-v2 + AnyGrasp | AI Manipulation Agents #2
17 phút đọc
Phần 3/5
ALRM: Code-as-Policy vs Tool-as-Policy trong ReAct | AI Manipulation Agents #3
12 phút đọc
Phần 4/5
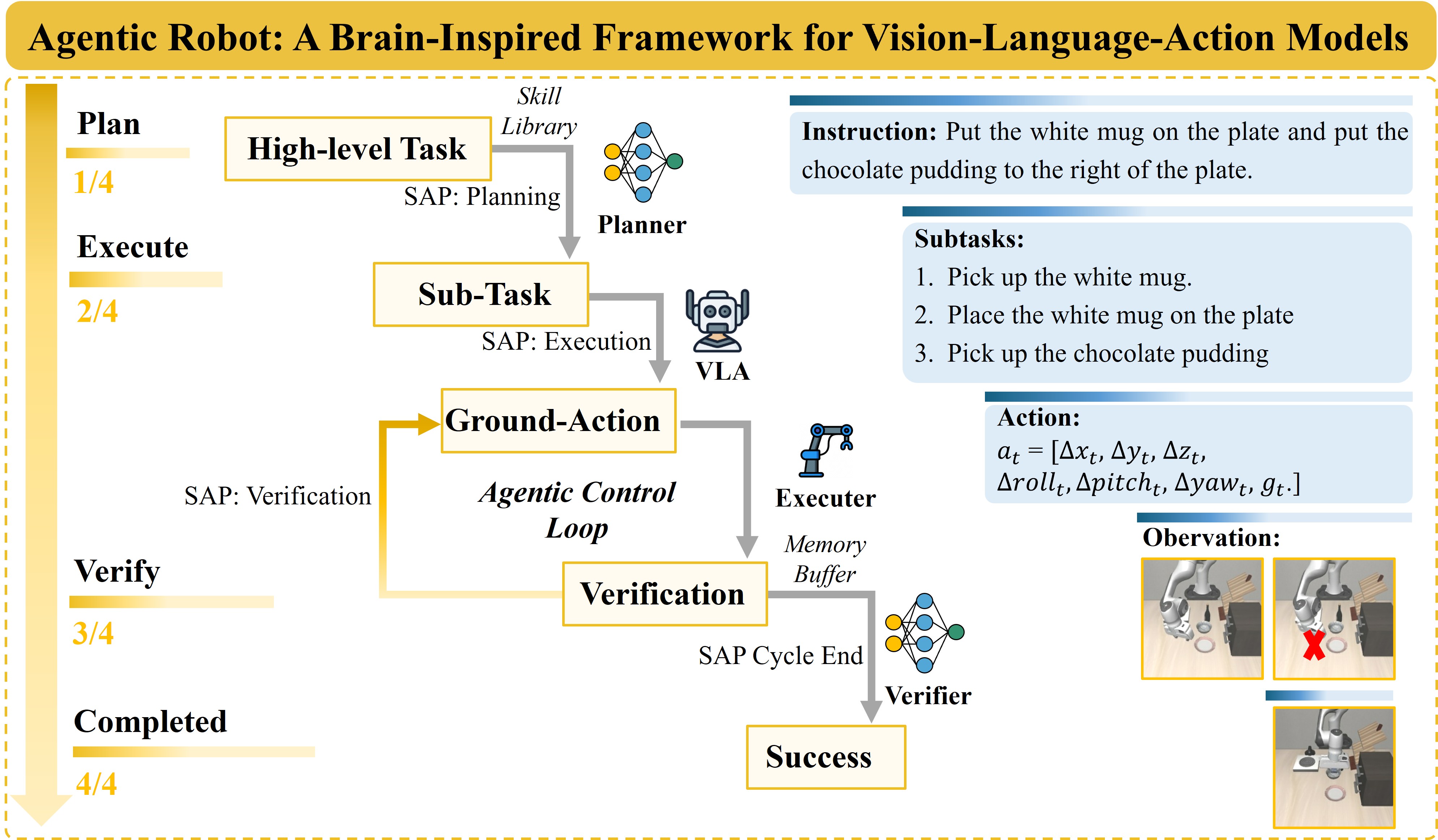
Agentic Robot: SAP Protocol + Temporal Verifier
14 phút đọc

Phần 5/5
Sim-to-Real Deploy: Đưa SAP Pipeline từ LIBERO ra Robot Thật | AI Manipulation Agents #5
16 phút đọc
Vima Humanoid Manip
· 5 phần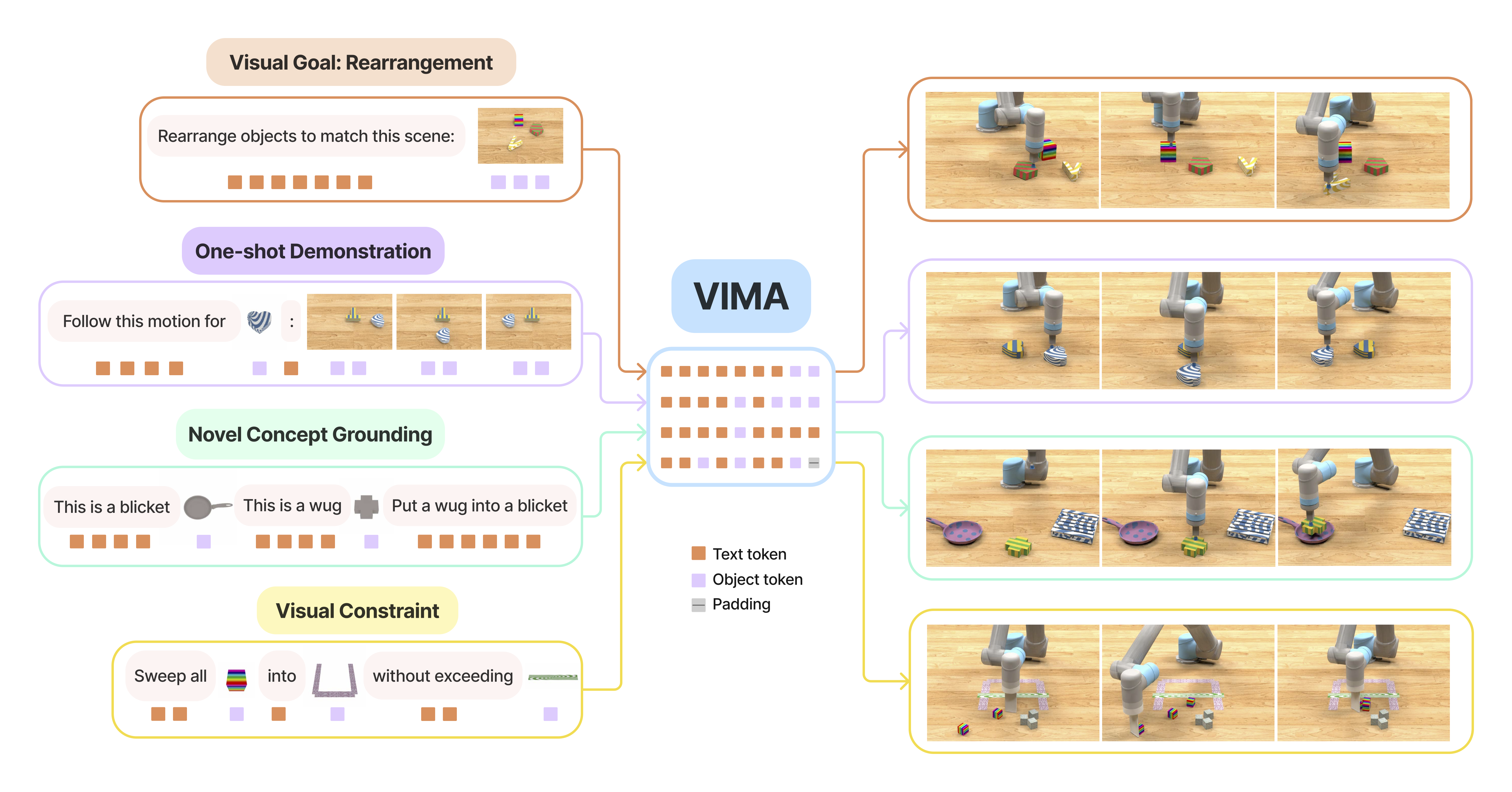
Phần 1/5
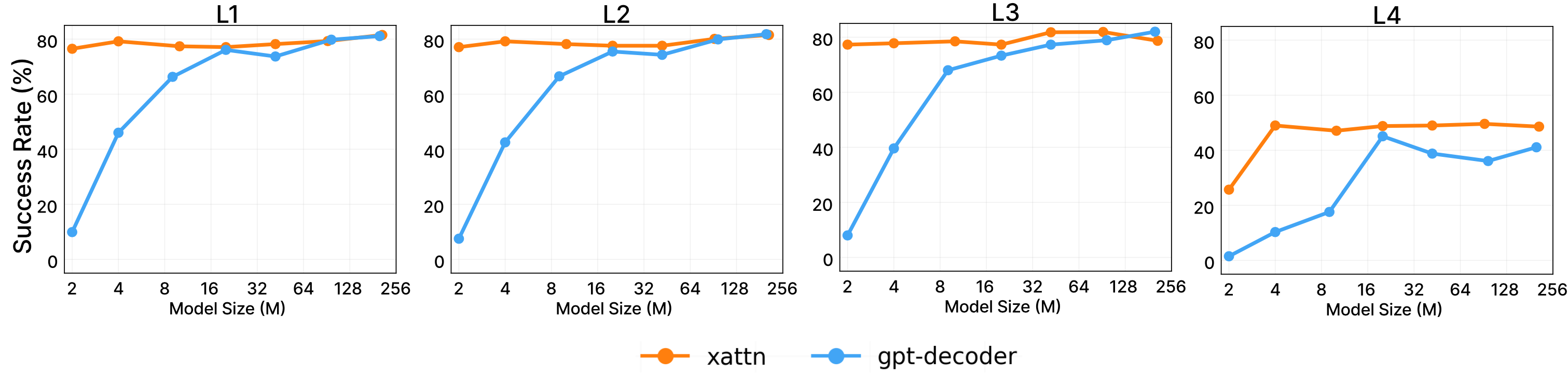
VIMA: Kiến Trúc Cross-Attention cho Tay Robot
11 phút đọc
Phần 2/5
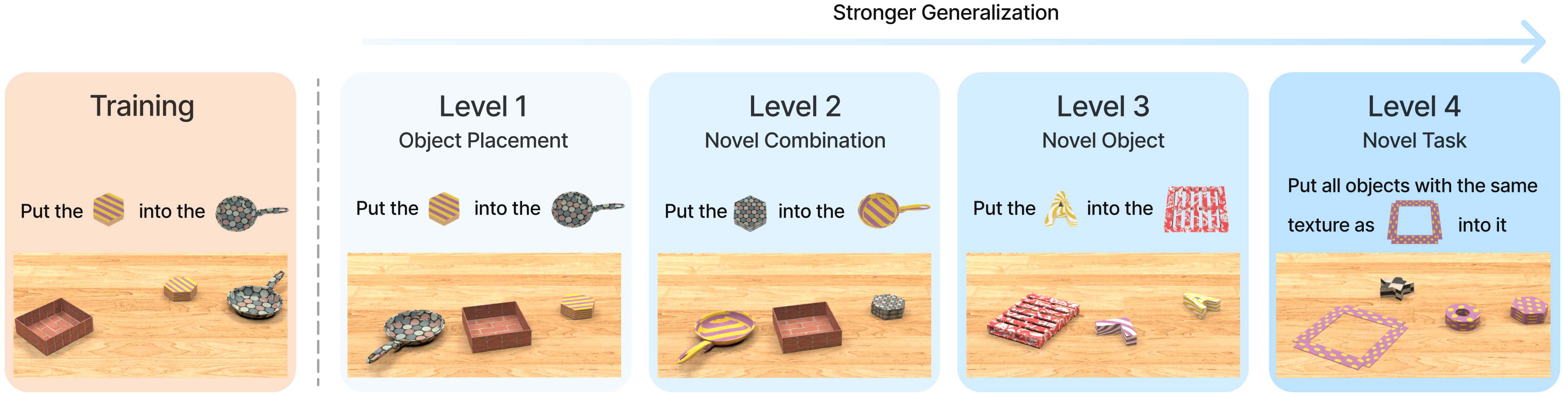
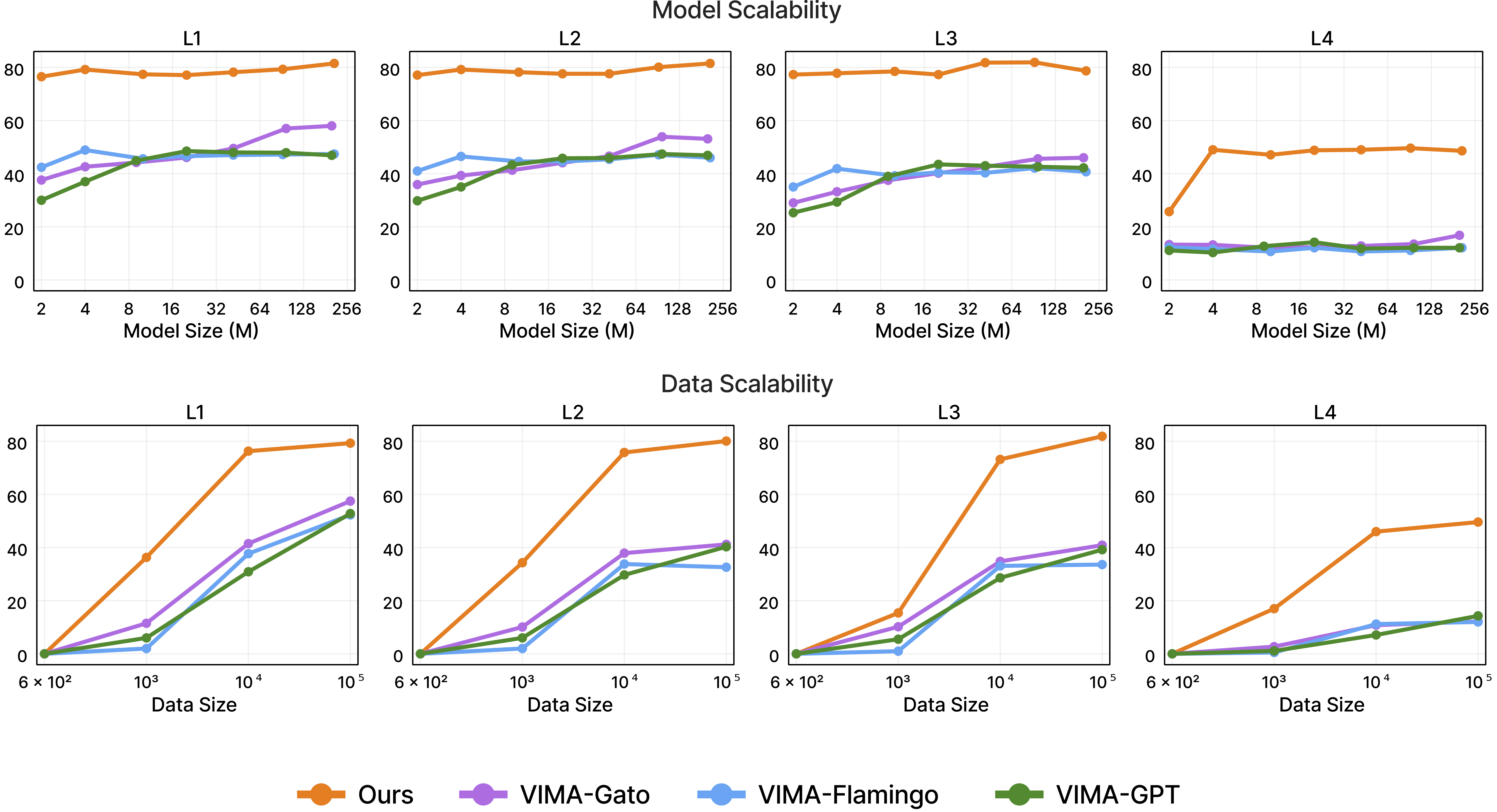
VimaBench: 17 Task, 4 Cấp Tổng Quát Hóa
17 phút đọc
Phần 3/5
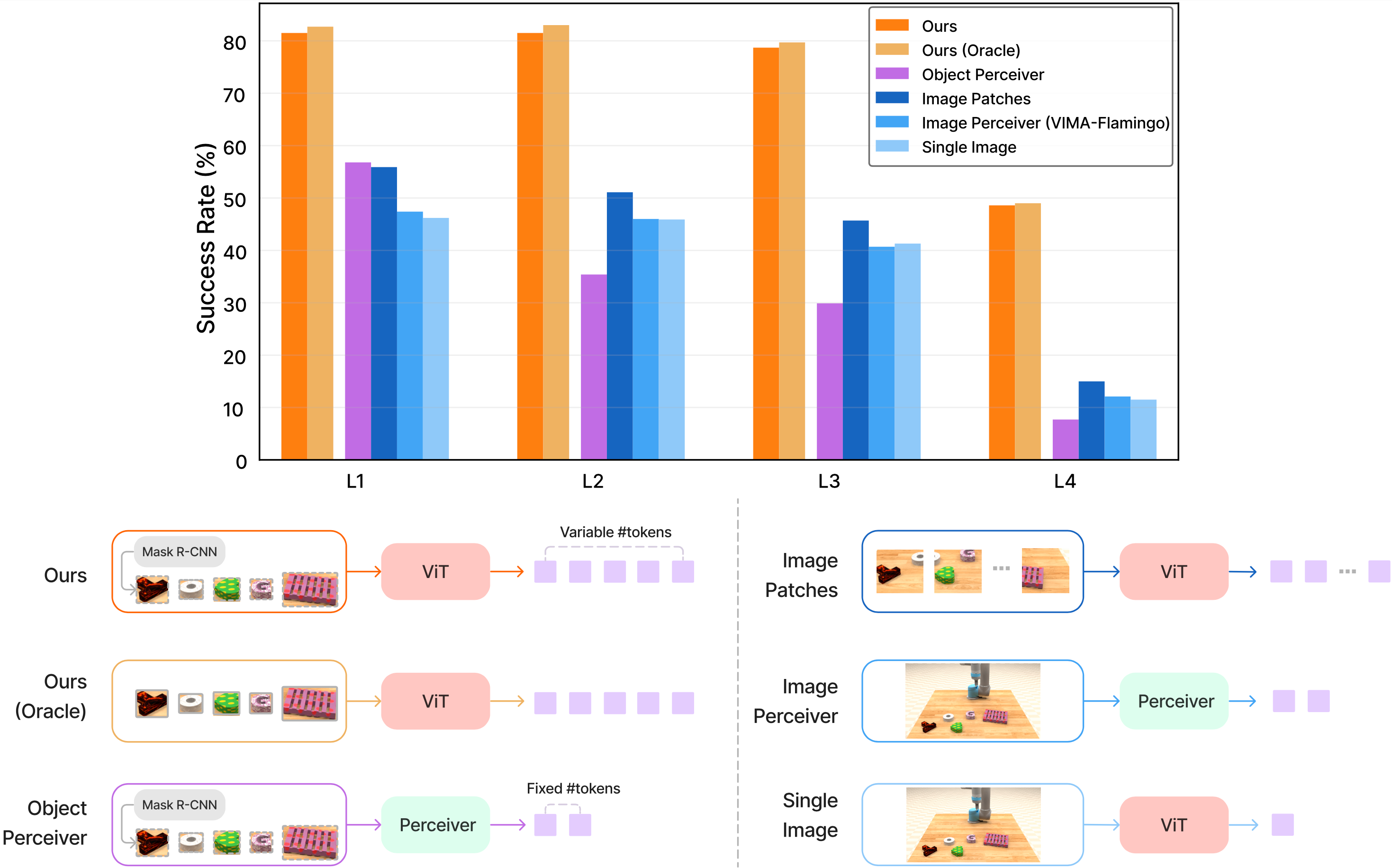
Object Tokenizer: Từ Pixel Thô đến Token Đối Tượng với Mask R-CNN + ViT
16 phút đọc
Phần 4/5
Dataset 650K: Thu Thập Dữ Liệu Đa Nhiệm Vụ Quy Mô Lớn cho VIMA
14 phút đọc
Phần 5/5
Humanoid Adaptation: Mở Rộng VIMA lên Robot Hình Người DoF Cao
21 phút đọc
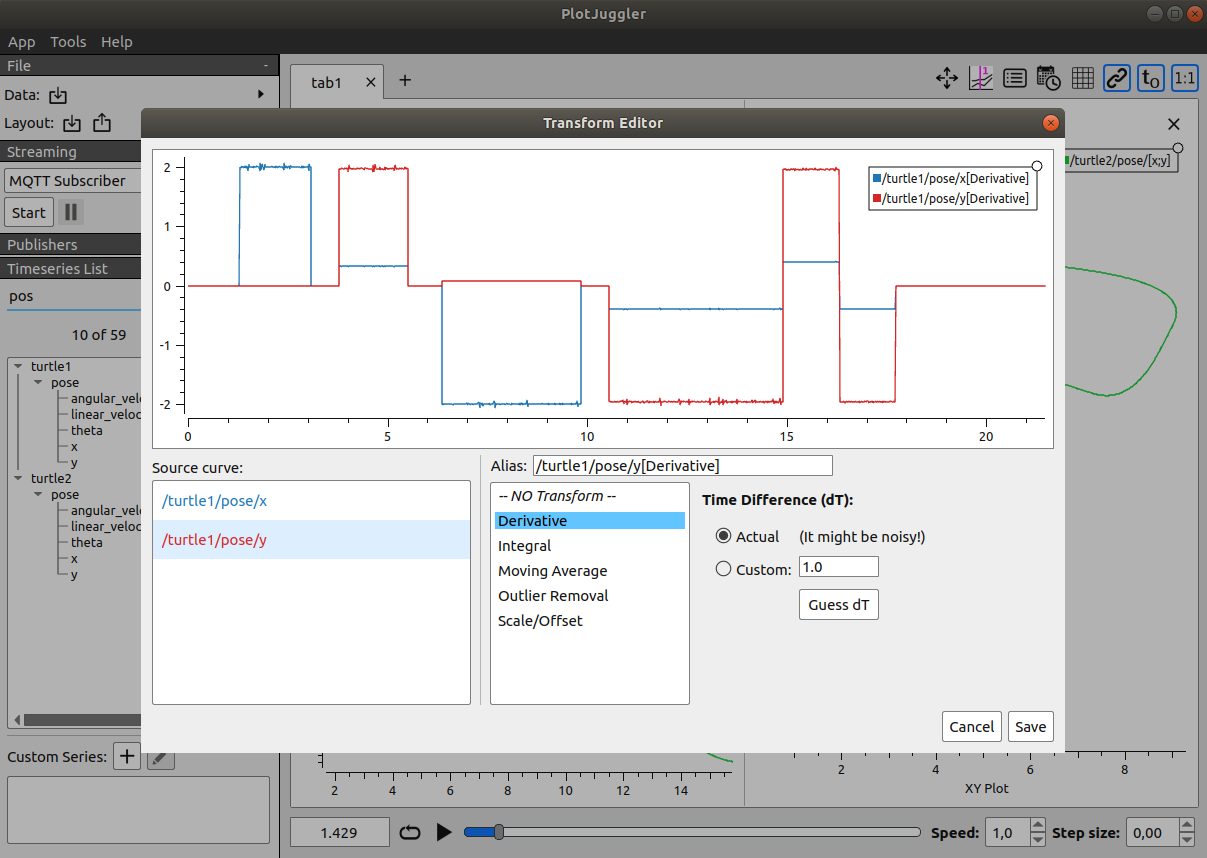
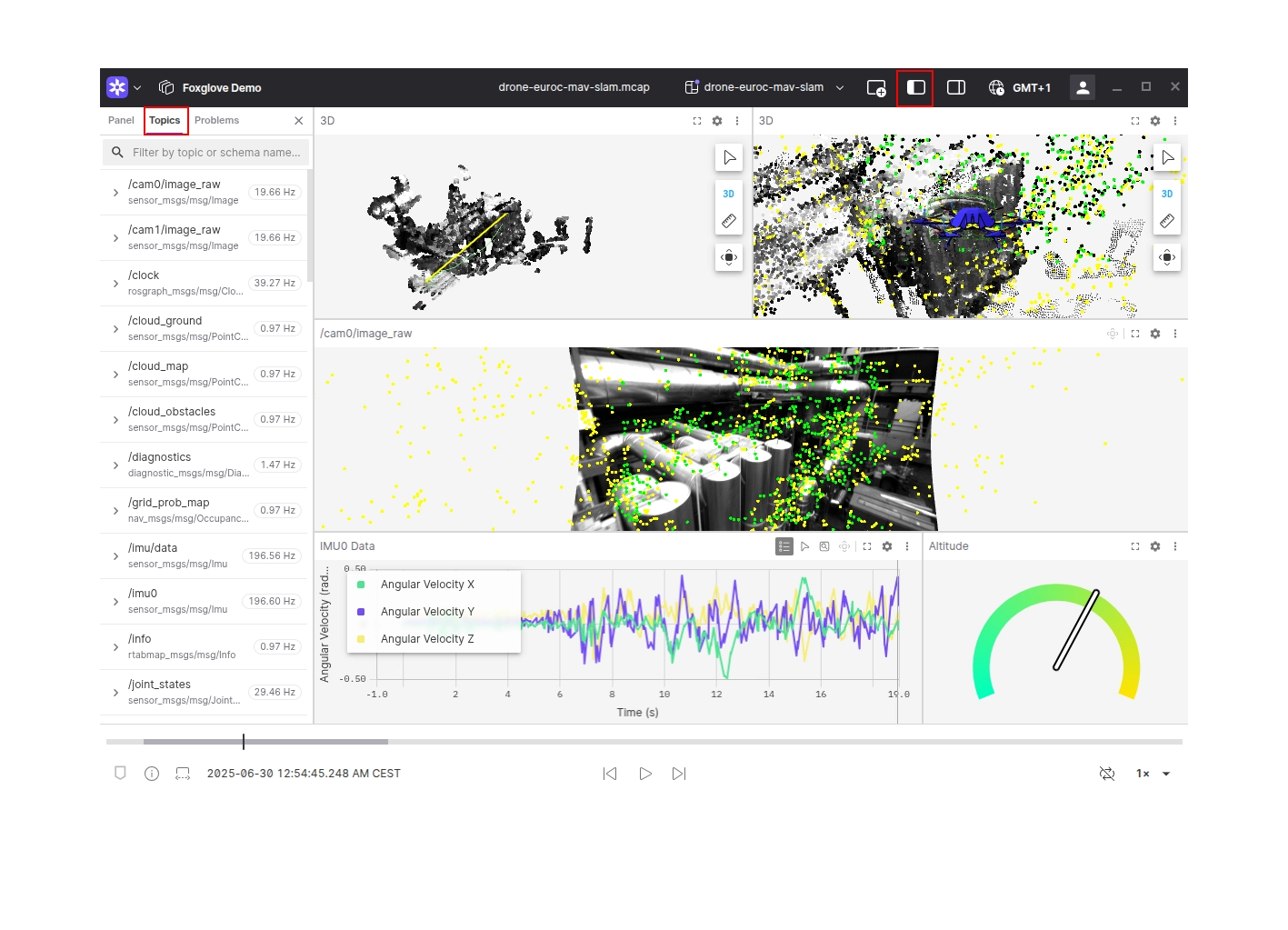
Plotjuggler G1 Debug
· 5 phần
Phần 1/5
PlotJuggler + G1: Cài đặt ROS2 và kết nối live
14 phút đọc
Phần 2/5
Visualize 23 khớp G1: MCAP bag replay & Layout XML
13 phút đọc

Phần 3/5
IMU Debug G1: Quaternion → Euler + FFT phân tích rung
18 phút đọc
Phần 4/5
PlotJuggler Lua Transforms: Tính power, tracking error cho G1
10 phút đọc
Phần 5/5
ZMQ + VideoViewer: Debug Sim-to-Real G1 với PlotJuggler
11 phút đọc
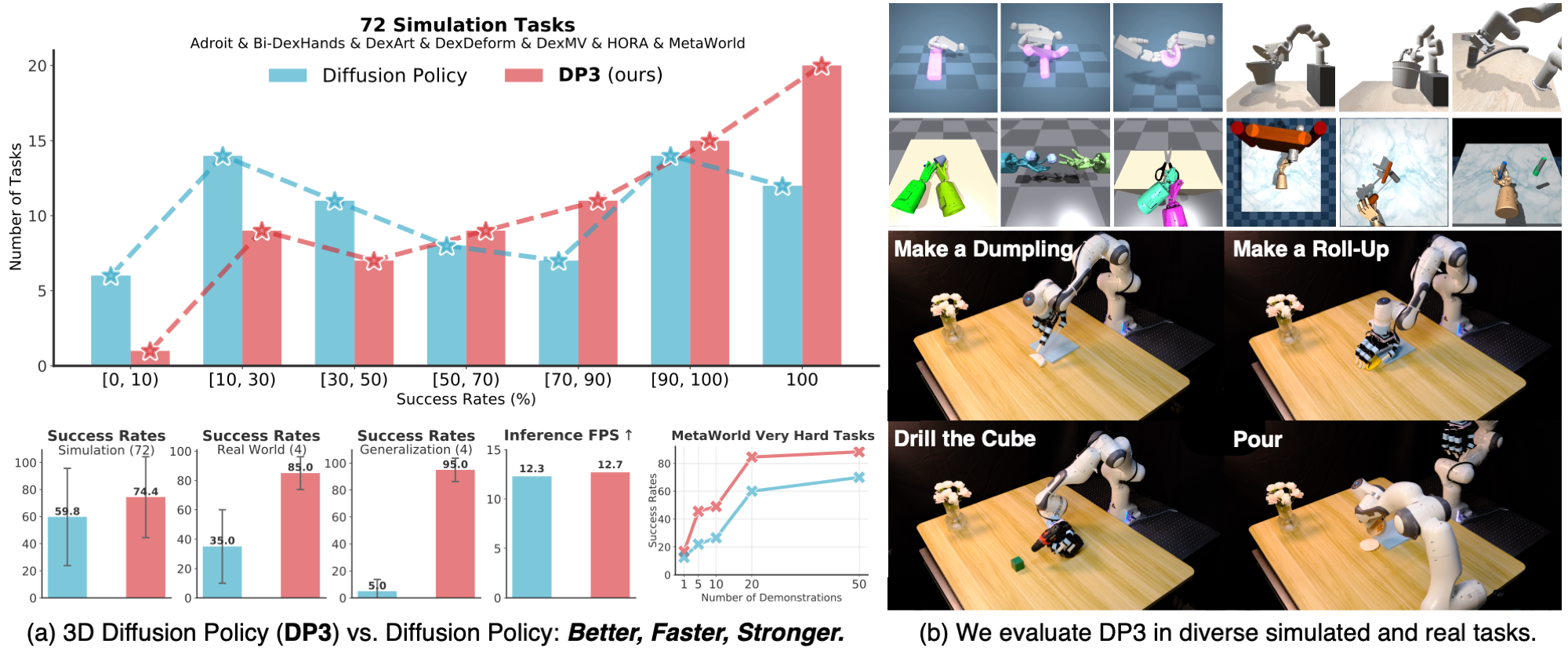
Robot 3d Manipulation Vla
· 7 phần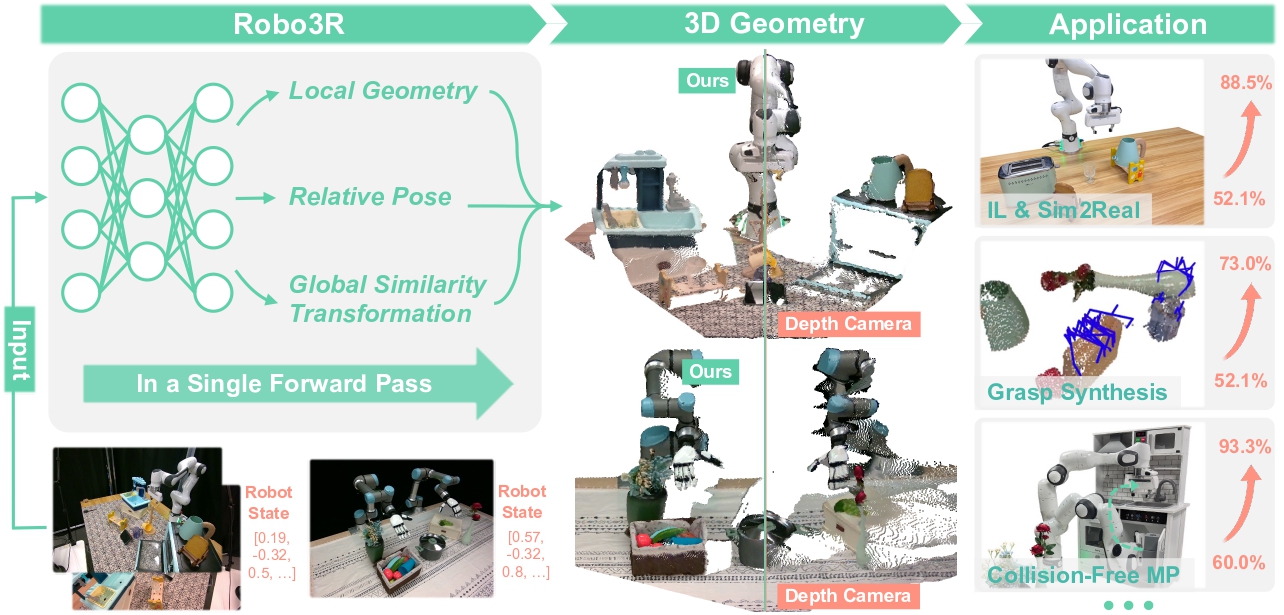
Phần 1/7
Vì sao VLA 2D chưa đủ cho manipulation
14 phút đọc

Phần 2/7
Robo3R: tái dựng 3D feed-forward cho robot arm
13 phút đọc
Phần 3/7
DP3: 3D Diffusion Policy với point cloud (hands-on)
15 phút đọc

Phần 4/7
Perception 3D cho humanoid: Omni-Manip & spatial reasoning
8 phút đọc

Phần 5/7
WholeBodyVLA: video egocentric + RL loco-manipulation
7 phút đọc
Phần 6/7
Thu data manipulation: teleop vs robot-free vs video
7 phút đọc
Phần 7/7
Roadmap 3D manipulation cho humanoid Unitree G1
7 phút đọc
Robot Arm Classical Controller
· 15 phần
Phần 1/15
Classical Robot Arm Control: Roadmap & Controller Stack
16 phút đọc

Phần 2/15
Dựng project C++ cho robot controller: CMake & Eigen
14 phút đọc

Phần 3/15
Mô hình cánh tay robot: joints, links, URDF, DH, SE(3)
16 phút đọc
Phần 4/15
Forward Kinematics từ số 0: DH đến SE(3) bằng C++
15 phút đọc
Phần 5/15
Inverse Kinematics: analytical vs numerical IK
14 phút đọc
Phần 6/15
Jacobian, singularity và resolved-rate control
14 phút đọc
Phần 7/15
Hệ tọa độ robot: Base, Tool, User Frame và TCP
11 phút đọc
Phần 8/15
MoveJ: chuyển động trong joint space
17 phút đọc
Phần 9/15
MoveL: chuyển động thẳng Cartesian với IK
13 phút đọc
Phần 10/15
MoveC và MoveP: cung tròn và đường quá trình
16 phút đọc
Phần 11/15
Profile vận tốc: trapezoid vs S-curve
17 phút đọc
Phần 12/15
Blending waypoint: bo góc mượt giữa các đoạn
20 phút đọc
Phần 13/15
Jogging và servo control: jog khớp và twist TCP
17 phút đọc
Phần 14/15
Motion Planning Tránh Va Chạm: MoveIt2 & OMPL
13 phút đọc
Phần 15/15
ROS2 control & robot thật: ros2_control + UR RTDE
14 phút đọc
G1 Mujoco Telemetry Control
· 6 phần
Phần 1/6
Dựng G1 MuJoCo qua DDS low-level
14 phút đọc
Phần 2/6
Biến LAFAN1 G1 thành MCAP Foxglove
14 phút đọc
Phần 3/6
Debug MPC/WBID G1 bằng PlotJuggler
16 phút đọc
Phần 4/6
Từ PD giữ dáng đến WBID có tiếp xúc
15 phút đọc
Phần 5/6
Upper body G1: IK, VR và MuJoCo
15 phút đọc
Phần 6/6
Checklist sim2real cho controller G1
15 phút đọc
Groot Sonic Humanoid Wbc
· 6 phần
Phần 1/6
Kiến trúc SONIC cho WBC humanoid
14 phút đọc
Phần 2/6
Chạy sim và đánh giá policy SONIC
14 phút đọc
Phần 3/6
Dữ liệu BONES-SEED và huấn luyện SONIC
14 phút đọc

Phần 4/6
Triển khai C++: TensorRT, ZMQ, ONNX
15 phút đọc

Phần 5/6
Teleop PICO và dữ liệu LeRobot cho VLA
15 phút đọc

Phần 6/6
MotionBricks: token chuyển động thời gian thực
15 phút đọc
Humanoid Data War 2026
· 7 phầnResearch
Phần 1/7
Cuộc Chiến Data: Ai Sở Hữu Dữ Liệu Robot Humanoid 2026?
12 phút đọc
Humanoid
Phần 2/7
Teleoperation: Thu Thập Dữ Liệu Robot Thực Tế
16 phút đọc
Humanoid
Phần 3/7
Human Video Mining: Khai Thác Video Người Cho Robot
18 phút đọc
Humanoid
Phần 4/7
Synthetic Data Pipeline: Từ Sim Đến Thực
17 phút đọc

Phần 5/7
VLA Data Scaling: Luật Scaling Cho Robot Learning
19 phút đọc
Humanoid
Phần 6/7
Data Strategy: Team Nhỏ Nên Thu Thập Dữ Liệu Gì?
19 phút đọc
Humanoid
Phần 7/7
Open vs Closed: License, Data Moat Và Tương Lai 2027
17 phút đọc
Humanoid Wbvla 2026 Lab
· 6 phầnPhần 1/6
OpenWBT: G1 teleop trong MuJoCo/Isaac
13 phút đọc

Phần 2/6
TWIST2: PICO teleop và G1 sim2real
17 phút đọc

Phần 3/6
EgoHumanoid: human demo sang G1 VLA
17 phút đọc
Phần 4/6
VIRAL: RGB sim2real cho G1 loco-manip
16 phút đọc
Phần 5/6
FRoM-W1: text → motion → G1 policy
17 phút đọc
Phần 6/6
CLONE: MoE teleop và chọn stack
17 phút đọc
VLA & LeRobot Mastery
· 17 phần
Phần 1/17
LeRobot Framework Deep Dive: Kiến trúc và API toàn diện
10 phút đọc
Phần 2/17
Thu thập dữ liệu bằng Teleoperation trong Simulation
11 phút đọc

Phần 3/17
Train Policy cho Single-Arm: ACT và Diffusion Policy
9 phút đọc
Phần 4/17
Multi-Object Manipulation: Sorting, Stacking và Rearranging
9 phút đọc
Whole-body VLA
Phần 5/17
Long-Horizon Tasks: Chuỗi hành động cho Multi-Step Manipulation
11 phút đọc

Phần 6/17
Dual-Arm Robot: Setup và Calibration với LeRobot
10 phút đọc
Phần 7/17
Bimanual Tasks: Folding, Pouring và Assembly với 2 tay
11 phút đọc
Phần 8/17
Mobile Manipulation: Base di chuyển + Arms trên Mobile Robot
9 phút đọc
Whole-body VLA
Phần 9/17
Humanoid Manipulation: Whole-body Control với LeRobot
9 phút đọc
Phần 10/17
Sim-to-Real Transfer: Deploy VLA Policy lên Robot thật
9 phút đọc
Phần 11/17
LeRobot v0.5: Tổng quan tính năng mới
11 phút đọc

Phần 12/17
SmolVLA: Train VLA 450M trên Consumer GPU
11 phút đọc

Phần 13/17
Pi0-FAST: VLA Autoregressive 5x nhanh hơn
13 phút đọc

Phần 14/17
HIL-SERL: RL trên Robot thật với LeRobot
17 phút đọc
Phần 15/17
PEFT/LoRA Fine-tune & Deploy VLA
12 phút đọc

Phần 16/17
SARM trong LeRobot: Reward Model cho VLA
16 phút đọc

Phần 16/17
LeRobot v0.5: Pi0-FAST + G1 Whole-Body Control
13 phút đọc
Humanoid Data Ownership 2026
· 6 phầnHumanoid
Phần 1/6
Bản đồ dữ liệu humanoid 2026
16 phút đọc

Phần 2/6
Teleop VR: từ PICO/ZED đến HDF5
18 phút đọc

Phần 3/6
Căn góc nhìn người sang robot
16 phút đọc
Phần 4/6
Dữ liệu tổng hợp với Isaac Mimic
14 phút đọc

Phần 5/6
Video người: Phantom và pi0.5
15 phút đọc
Phần 6/6
Stack VLA: dữ liệu đến triển khai
13 phút đọc
Humanoid Vla Data Center 2026
· 6 phầnPhần 1/6
Pilot 2 người cho dữ liệu humanoid VLA
15 phút đọc
Phần 2/6
Chọn teleoperation stack cho humanoid
16 phút đọc
Phần 3/6
ROS 2 MCAP làm chuẩn raw log
16 phút đọc

Phần 4/6
LeRobotDataset và Robo-DM cho data lake
11 phút đọc
Phần 5/6
Synthetic data và QA bằng Isaac Lab
13 phút đọc

Phần 6/6
Scale 20 người và eval whole-body VLA
15 phút đọc
Wholebodyvla Data Wbc
· 7 phần
Phần 1/7
Bản đồ pipeline WholeBodyVLA
16 phút đọc

Phần 2/7
Video ego cho LAM locomotion
19 phút đọc
Phần 3/7
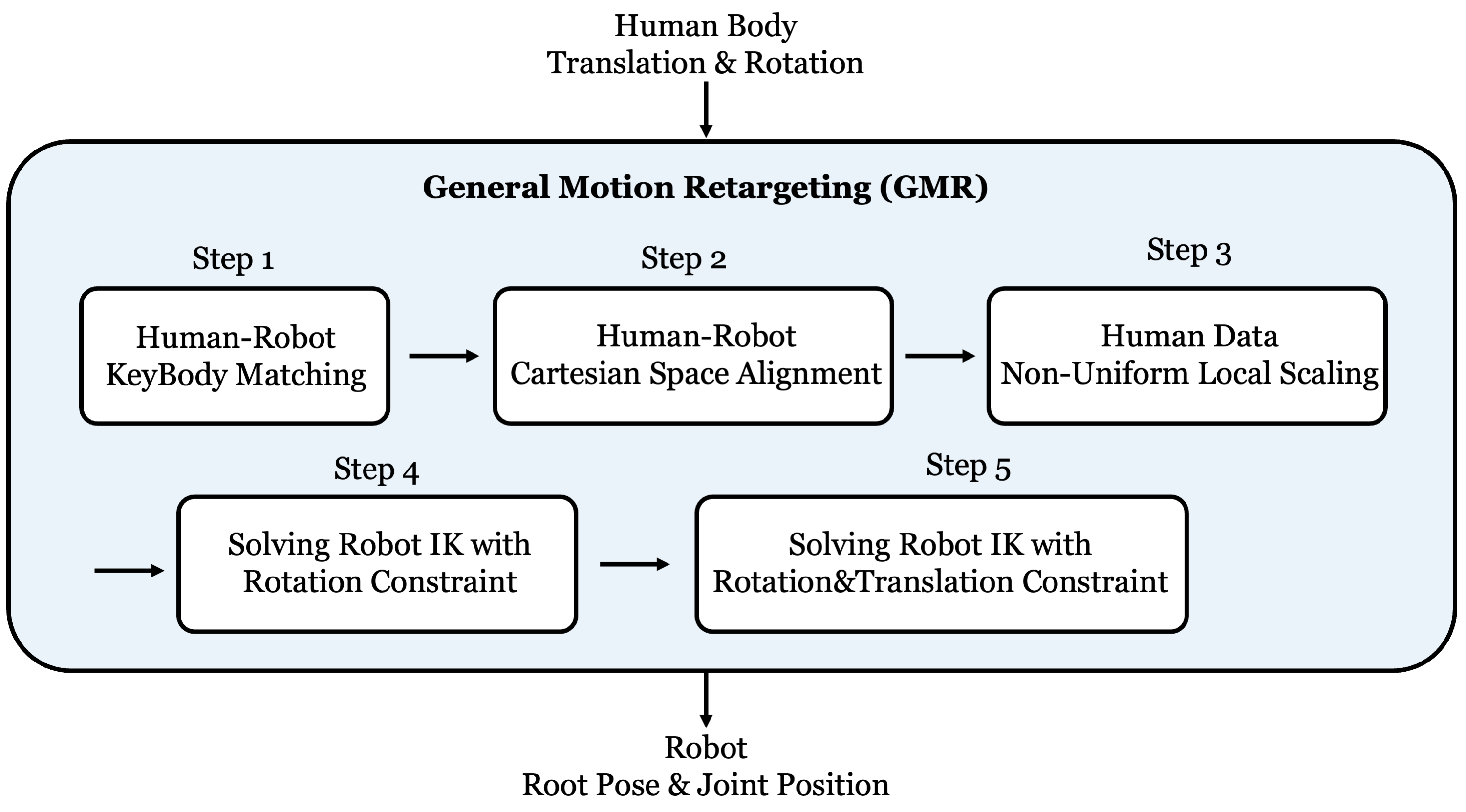
Retarget AMASS/GMR sang robot
19 phút đọc

Phần 4/7
Teleop toàn thân: TWIST và HOMIE
17 phút đọc
Phần 5/7
Huấn luyện tracker và LMO RL
17 phút đọc
Phần 6/7
Sim-to-real: kiểm trước khi lên G1
15 phút đọc

Phần 7/7
Đánh giá VLA toàn thân
15 phút đọc
AI cho Robot
· 8 phầnRobot AI
Phần 1/8
RL cho Robotics: PPO, SAC và cách chọn algorithm
10 phút đọc
Robot AI
Phần 2/8
Imitation Learning: BC, DAgger và DAPG cho robot
11 phút đọc
Phần 3/8
Action Chunking Transformers (ACT): Kiến trúc chi tiết
11 phút đọc
Phần 4/8
Diffusion Policy: Cách mạng robot manipulation
10 phút đọc
Robot AI
Phần 5/8
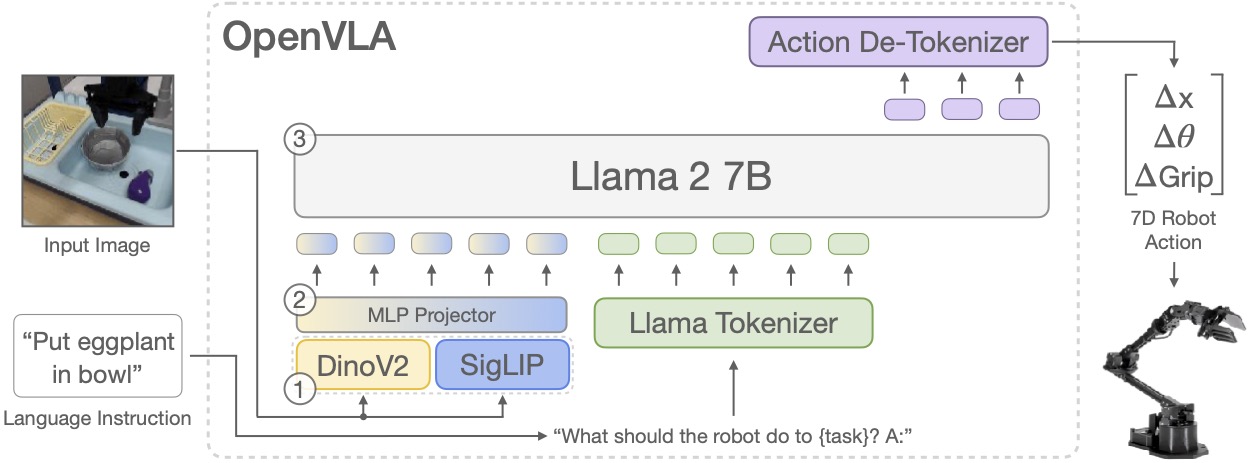
VLA Models: RT-2 → Octo → OpenVLA → π0
13 phút đọc
Phần 6/8
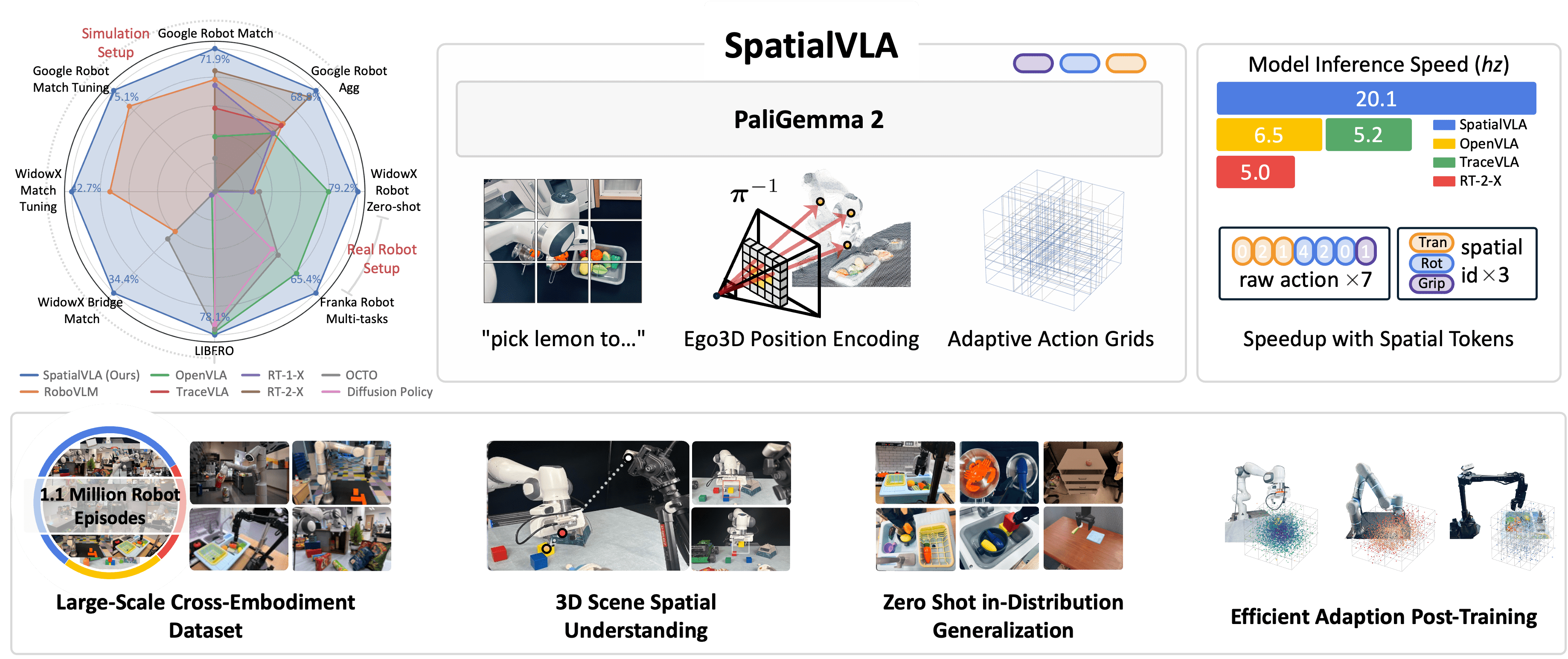
SpatialVLA: 3D understanding cho robot manipulation
10 phút đọc
Phần 7/8
Hands-on: Fine-tune OpenVLA với LeRobot
13 phút đọc
Phần 8/8
OpenVLA: VLA mở cho robot
15 phút đọc
Grail Humanoid Data Pipeline
· 6 phần
Phần 1/6
Tạo asset 3D và terrain cho GRAIL
16 phút đọc
Phần 2/6
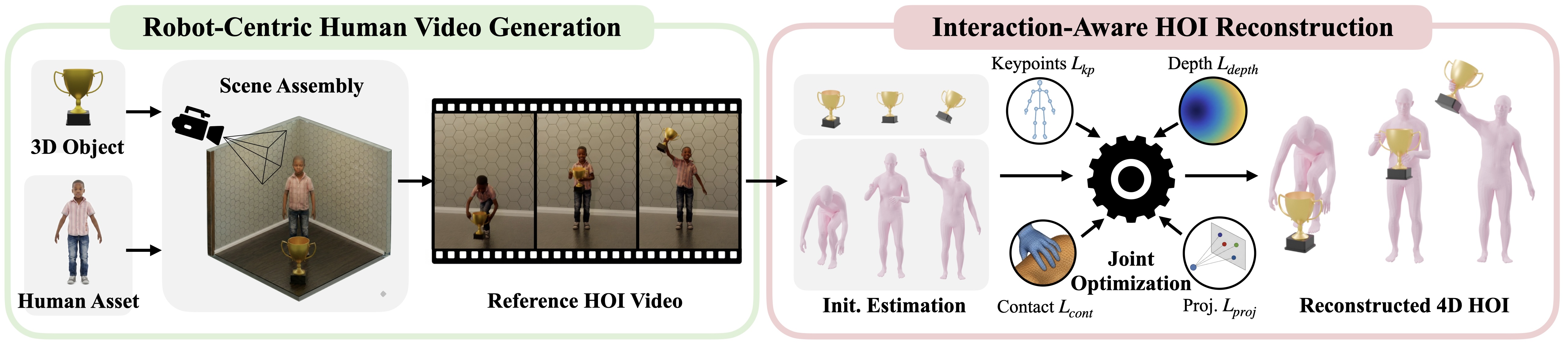
Sinh video 2D HOI bằng Blender và Kling
15 phút đọc
Phần 3/6
Tái dựng 4D HOI: GEM, SAM2, MoGe
16 phút đọc
Phần 4/6
Static-object mode cho stairs, slope, sitting
16 phút đọc
Phần 5/6
Retarget SMPL-X sang Unitree G1
15 phút đọc
Phần 6/6
Train SONIC, export và đánh giá GRAIL
14 phút đọc
Unifolm Vla G1 Series
· 5 phần
Phần 1/5
unifolm-vla + Unitree G1 (Bài 1): kiến trúc hệ thống WBC+VLA từ dữ liệu đến robot thật
7 phút đọc

Phần 2/5
unifolm-vla + Unitree G1 (Bài 2): thu thập dữ liệu với xr_teleoperate + Meta Quest 3
8 phút đọc
Phần 3/5
unifolm-vla + Unitree G1 (Bài 3): data pipeline — JSON → LeRobot → HDF5 → RLDS
6 phút đọc

Phần 4/5
unifolm-vla + Unitree G1 (Bài 4): fine-tune từ Qwen2.5-VL-7B — 8-GPU và single-GPU LoRA
8 phút đọc
Phần 5/5
unifolm-vla + Unitree G1 (Bài 5): deploy inference server, SSH tunnel, và locomotion song song
9 phút đọc
Groot N1 G1 Series
· 5 phần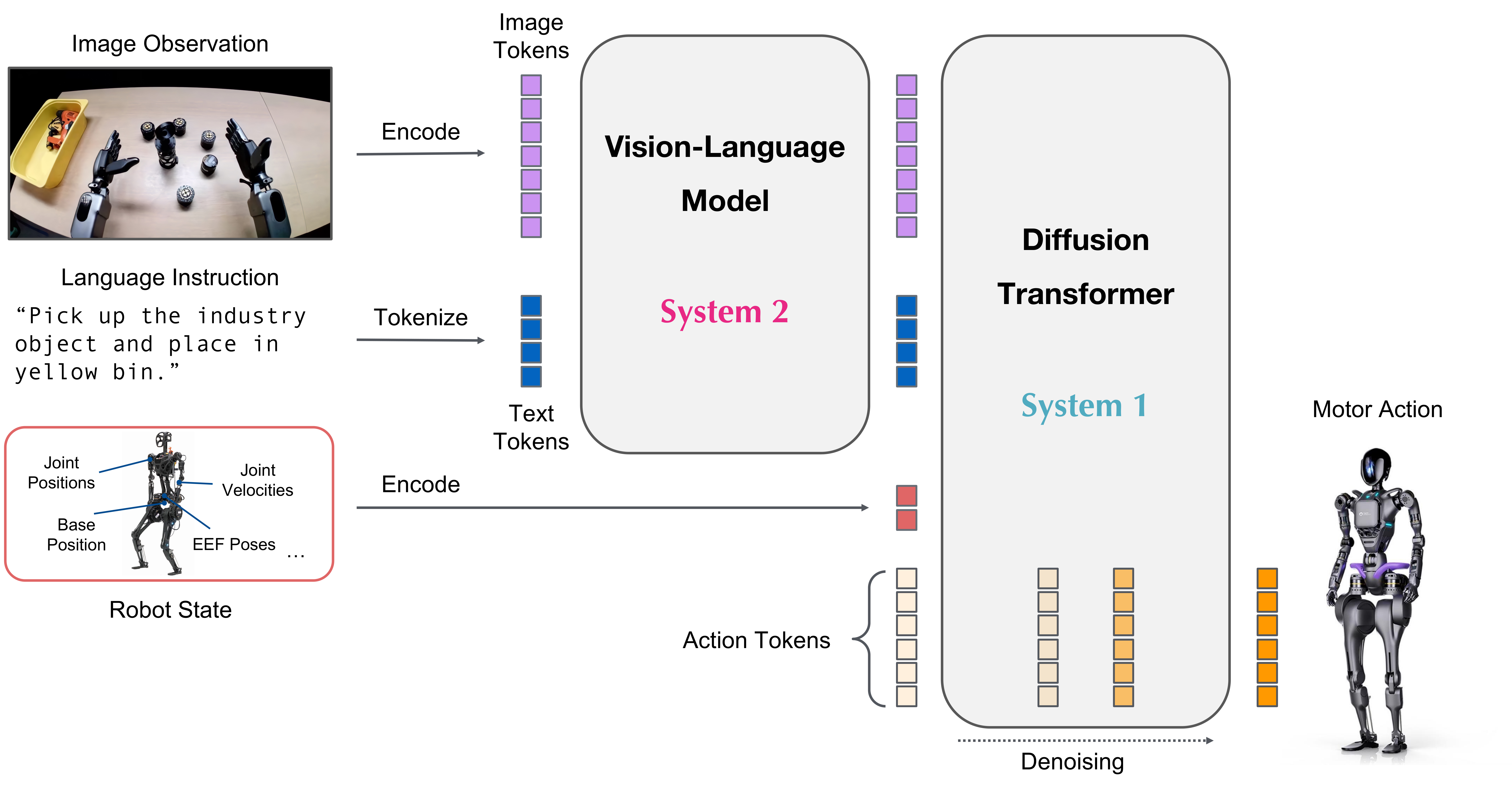
Phần 1/5
GR00T N1 + Unitree G1: kiến trúc WBC+VLA decoupled từ 6Hz đến 500Hz
6 phút đọc

Phần 2/5
GR00T N1 + G1 (Bài 2): thu data trong Isaac Lab và xr_teleoperate → LeRobot
6 phút đọc
Phần 3/5
GR00T N1 + G1 (Bài 3): fine-tune GR00T N1 — GPU, config, training script
5 phút đọc
Phần 4/5
GR00T N1 + G1 (Bài 4): deploy GR00T-WBC trên Unitree G1 — GEAR + SONIC
6 phút đọc
Phần 5/5
GR00T N1 + G1 (Bài 5): sim2real transfer, domain randomization, và eval với humanoid-bench
6 phút đọc
GR00T Whole-body VLA Data Pipeline
· 4 phần
Umi Vla Series
· 7 phần
Phần 1/7
UMI là gì? Cách thu data VLA cho robot mà không cần teleop
8 phút đọc
Phần 2/7
Lắp UMI gripper đầu tiên: in 3D, assembly, và smoke test GoPro
8 phút đọc

Phần 3/7
Thu demo đơn tay với UMI và chạy SLAM pipeline chính thức
8 phút đọc
Phần 4/7
Train Diffusion Policy đầu tiên với UMI và test trên robot arm
6 phút đọc
Phần 5/7
Lên hai tay: UMI bimanual pipeline với scripts chính thức
7 phút đọc
Manipulation
Phần 6/7
Upgrade lên D405: khi nào nên thay GoPro trong UMI và cách làm
7 phút đọc
Phần 7/7
Whole-body VLA: kết hợp UMI + mocap/VR để thu data toàn thân
8 phút đọc
Vla Wbc Repos
· 3 phần
Simplevla Rl
· 11 phần
Phần 1/11
SimpleVLA-RL (1): Tổng quan & Ý tưởng
11 phút đọc
Phần 2/11
SimpleVLA-RL (2): Kiến trúc & Thuật toán
16 phút đọc
Phần 3/11
SimpleVLA-RL (3): Setup & Training
12 phút đọc
Phần 4/11
SimpleVLA-RL (4): Kết quả & Bài học
14 phút đọc
Whole-body VLA
Phần 5/11
SimpleVLA-RL (5): So sánh với LeRobot
12 phút đọc
Phần 6/11
SimpleVLA-RL (6): OpenArm — Phân tích Lộ trình
13 phút đọc
Whole-body VLA
Phần 7/11
SimpleVLA-RL (7): Collect Data cho OpenArm
16 phút đọc
Phần 8/11
SimpleVLA-RL (8): Train & Deploy trên OpenArm
14 phút đọc
Phần 9/11
SimpleVLA-RL (9): OpenArm Simulation & Data
18 phút đọc

Phần 10/11
SimpleVLA-RL (10): SFT & RL Training cho OpenArm
16 phút đọc

Phần 11/11
SimpleVLA-RL (11): Sim-to-Real cho OpenArm
17 phút đọc
Psi0 Hands On
· 6 phần
Phần 1/6
Ψ₀ Hands-On (1): Tổng quan & Ý tưởng
13 phút đọc
Phần 2/6
Ψ₀ Hands-On (2): Kiến trúc 3 tầng
16 phút đọc
Phần 3/6
Ψ₀ Hands-On (3): Data Recipe & Pipeline
12 phút đọc
Phần 4/6
Ψ₀ Hands-On (4): Setup & Training Pipeline
14 phút đọc
Phần 5/6
Ψ₀ Hands-On (5): Inference & Evaluation
14 phút đọc
Phần 6/6
Ψ₀ Hands-On (6): Ablation & Bài học rút ra
16 phút đọc
RL Locomotion cho Humanoid Robot
· 10 phần
Phần 1/10
RL Locomotion cho Humanoid: Cơ bản và Environment Setup
10 phút đọc
Phần 2/10
Reward Engineering cho Bipedal Walking: Nghệ thuật thiết kế reward
11 phút đọc

Phần 3/10
Unitree G1: Train Walking Policy từ Scratch trong Isaac Lab
10 phút đọc

Phần 4/10
Unitree G1: Terrain Adaptation và Robust Walking
9 phút đọc

Phần 5/10
Unitree H1: Full-size Humanoid Locomotion Training
10 phút đọc
Phần 6/10
Unitree H1: Running, Turning và Dynamic Motions
9 phút đọc

Phần 7/10
Unitree H1-2: Enhanced Locomotion với New Hardware
9 phút đọc
Phần 8/10
Loco-Manipulation: Walking trong khi bê và thao tác vật thể
9 phút đọc
Phần 9/10
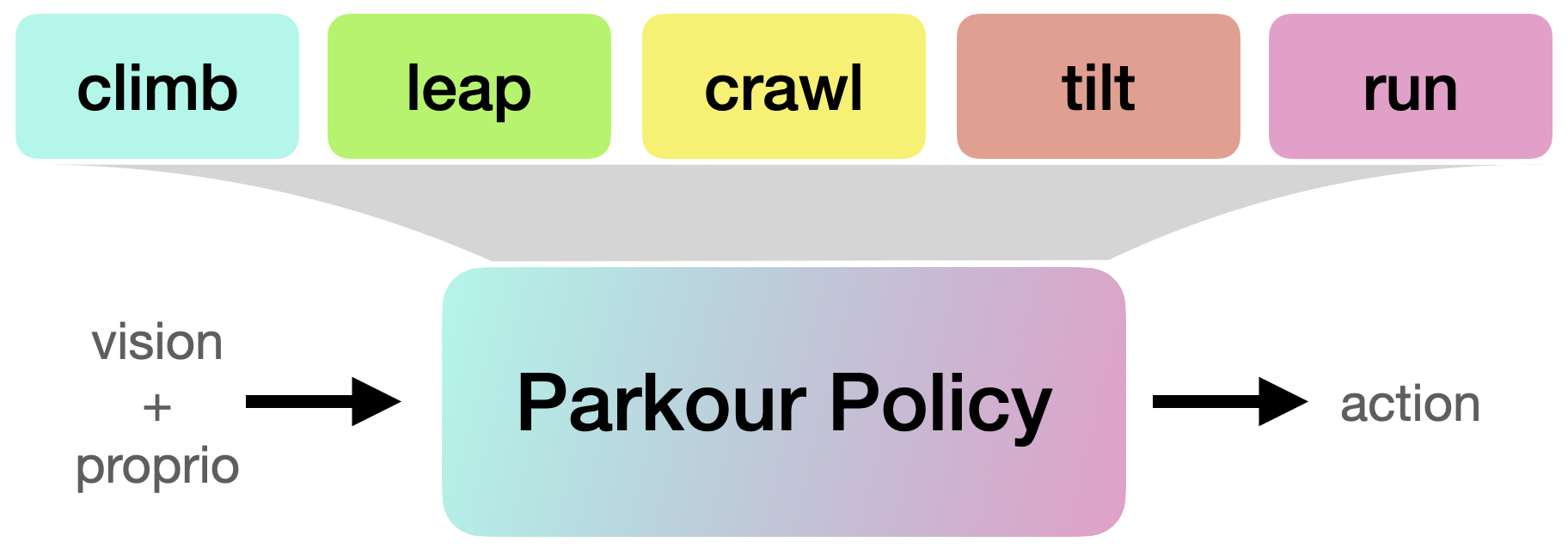
Humanoid Parkour: Jumping, Climbing và Obstacle Course
9 phút đọc
Humanoid
Phần 10/10
Sim-to-Real cho Humanoid: Deployment Best Practices
11 phút đọc
RL cho Robot Manipulation
· 8 phầnManipulation
Phần 1/8
RL cho Manipulation: MDP, Reward Design và Environment Setup
13 phút đọc
Manipulation
Phần 2/8
Grasping với RL: Stable Grasp và Object Variety
12 phút đọc
Phần 3/8
Force Control bằng RL: Giữ cốc nước thăng bằng
11 phút đọc
Manipulation
Phần 4/8
Pick-and-Place chính xác: Position và Orientation Control
8 phút đọc
Manipulation
Phần 5/8
Bê và vận chuyển vật thể: Ổn định trong di chuyển
9 phút đọc
Phần 6/8
Contact-Rich Manipulation: Assembly, Insertion và Peg-in-Hole
9 phút đọc
Manipulation
Phần 7/8
Tool Use: Robot học sử dụng dụng cụ bằng RL
8 phút đọc
Manipulation
Phần 8/8
Multi-Step Manipulation: Curriculum Learning cho Long-Horizon
10 phút đọc
Simulation cho Robotics
· 6 phầnSimulation
Phần 1/6
Simulation cho Robotics: MuJoCo vs Isaac Sim vs Gazebo
10 phút đọc
Phần 2/6
Bắt đầu với MuJoCo: Cài đặt đến mô phỏng robot đầu tiên
11 phút đọc
Phần 3/6
NVIDIA Isaac Lab: GPU-accelerated RL training từ zero
11 phút đọc

Phần 4/6
Domain Randomization: Chìa khóa Sim-to-Real Transfer
10 phút đọc
Simulation
Phần 5/6
Sim-to-Real Pipeline: Từ training đến robot thật
15 phút đọc
Simulation
Phần 6/6
Digital Twins và ROS 2: Simulation trong sản xuất
11 phút đọc
ROS 2 từ A đến Z
· 7 phần
Phần 1/7
ROS 2 từ A đến Z (Phần 1): Cài đặt và Node đầu tiên
10 phút đọc
Phần 2/7
ROS 2 từ A đến Z (Phần 2): Topics, Services và Actions
10 phút đọc
Phần 3/7
ROS 2 từ A đến Z (P3): Parameters, Launch, Lifecycle
7 phút đọc

Phần 4/7
ROS 2 từ A đến Z (P4): TF2, URDF và RViz2
7 phút đọc
Phần 5/7
ROS 2 từ A đến Z (P5): ros2_control và Hardware
12 phút đọc

Phần 6/7
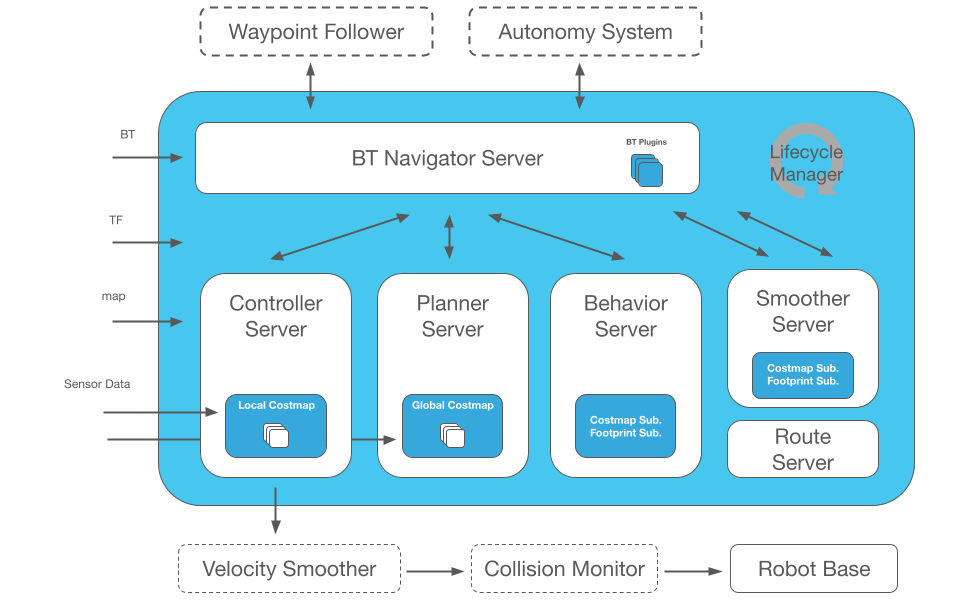
ROS 2 từ A đến Z (P6): Nav2 — Robot tự hành
11 phút đọc
Phần 7/7
ROS 2 từ A đến Z (P7): Simulation, rosbag2 và Debug
9 phút đọc
Robot Manipulation Masterclass
· 7 phần
Phần 1/7
Robot Grasping 101: Analytical đến learning-based
9 phút đọc
Phần 2/7
Imitation Learning cho Manipulation: BC, DAgger, ACT
9 phút đọc
Phần 3/7
Diffusion Policy thực hành: Từ lý thuyết đến code
8 phút đọc
Phần 4/7
VLA cho Manipulation: RT-2, Octo, pi0 thực tế
9 phút đọc

Phần 5/7
Dexterous Manipulation: Thao tác bàn tay robot
8 phút đọc
Phần 6/7
Bimanual Manipulation: Dạy robot dùng 2 tay
8 phút đọc
Phần 7/7
Xây dựng hệ thống manipulation với LeRobot
9 phút đọc
Locomotion từ Zero đến Hero
· 7 phần
Phần 1/7
Locomotion cơ bản: Từ ZMP đến CPG
12 phút đọc

Phần 2/7
RL cho Locomotion: PPO, reward shaping và curriculum
11 phút đọc
Phần 3/7
Quadruped Locomotion: legged_gym đến Unitree Go2
11 phút đọc

Phần 4/7
Walk These Ways: Adaptive locomotion một policy
10 phút đọc
Phần 5/7
Robot Parkour: Nhảy, leo cầu thang bằng RL
9 phút đọc

Phần 6/7
Bipedal Walking: Điều khiển robot 2 chân bằng RL
11 phút đọc
Phần 7/7
Sim-to-Real cho Locomotion: Thực tế và kinh nghiệm
13 phút đọc
Humanoid Robot Engineering
· 6 phầnHumanoid
Phần 1/6
Humanoid Robots 2026: Toàn cảnh các nền tảng
9 phút đọc
Humanoid
Phần 2/6
Humanoid control cơ bản: IK đến task-space control
9 phút đọc
Phần 3/6
Whole-Body MPC: Điều khiển toàn thân real-time
10 phút đọc
Phần 4/6
RL cho Humanoid: Humanoid-Gym đến sim2real
9 phút đọc

Phần 5/6
Loco-Manipulation: Robot vừa đi vừa thao tác
8 phút đọc
Humanoid
Phần 6/6
Tương lai Humanoid: Cơ hội cho kỹ sư robotics
9 phút đọc
Navigation hiện đại
· 5 phần
Phần 1/5
SLAM từ A đến Z: LiDAR, Visual và cách robot định vị
9 phút đọc
Phần 2/5
ROS 2 Nav2: Navigation hoàn chỉnh cho AMR
8 phút đọc
Phần 3/5
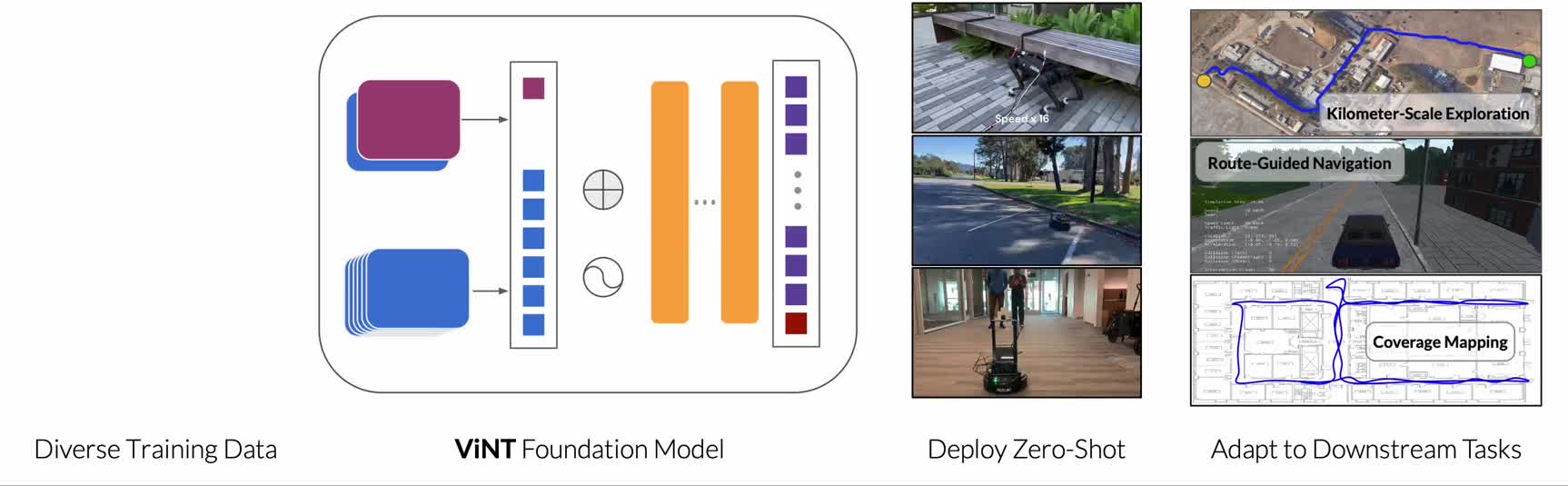
Learning-based Navigation: GNM, ViNT và NoMaD
10 phút đọc

Phần 4/5
Vision-Language Navigation: Robot đi theo chỉ dẫn
9 phút đọc
Phần 5/5
Outdoor Navigation và Multi-Robot Coordination
11 phút đọc
Trending
- 1
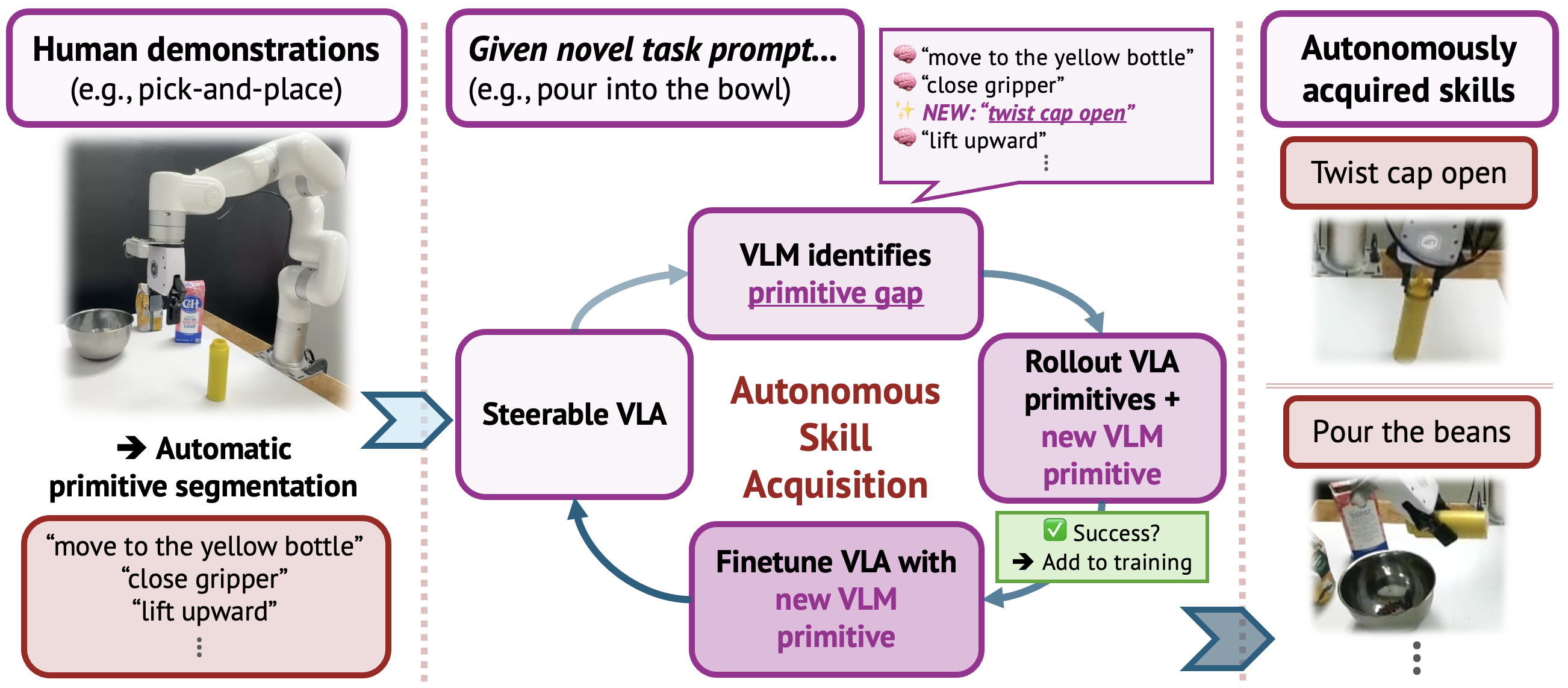
InSight: VLA Tự Học Kỹ Năng Manipulation Mới Không Cần Demo Người
10 min readNEW - 2
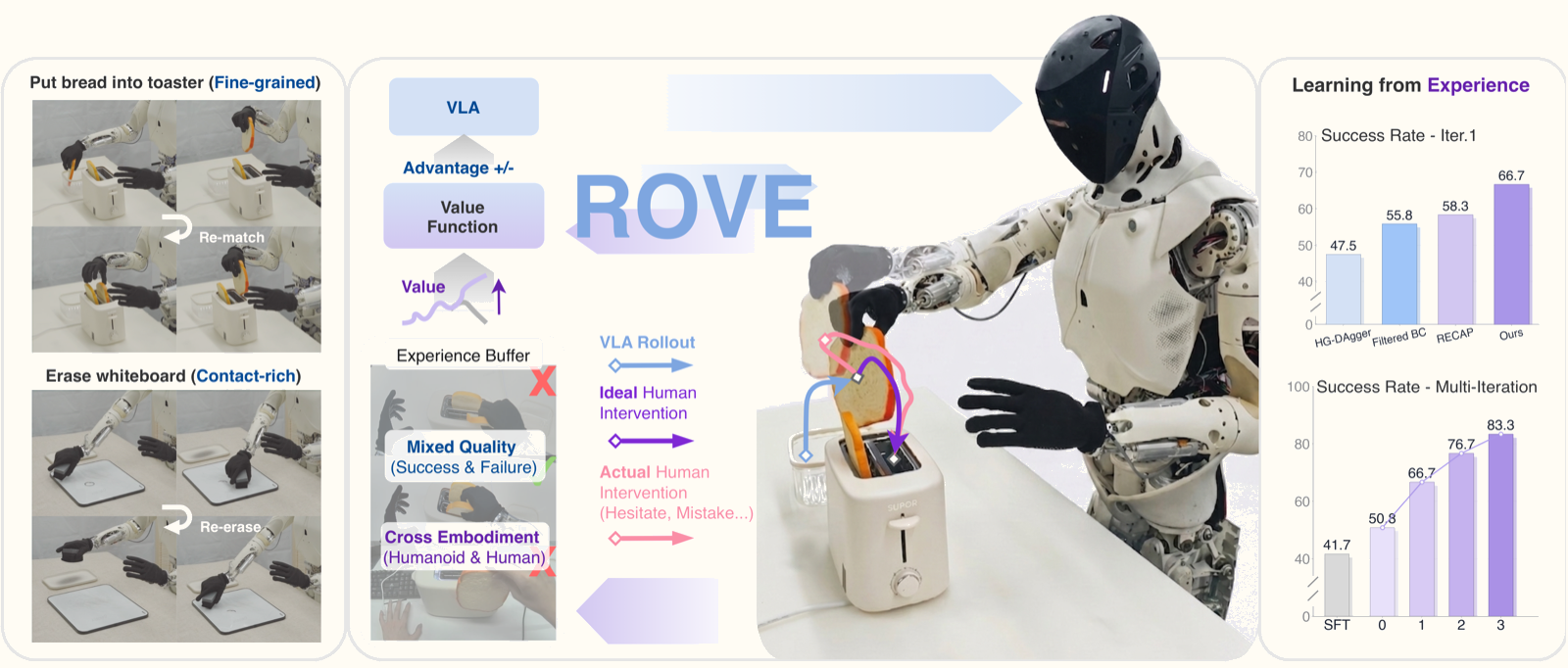
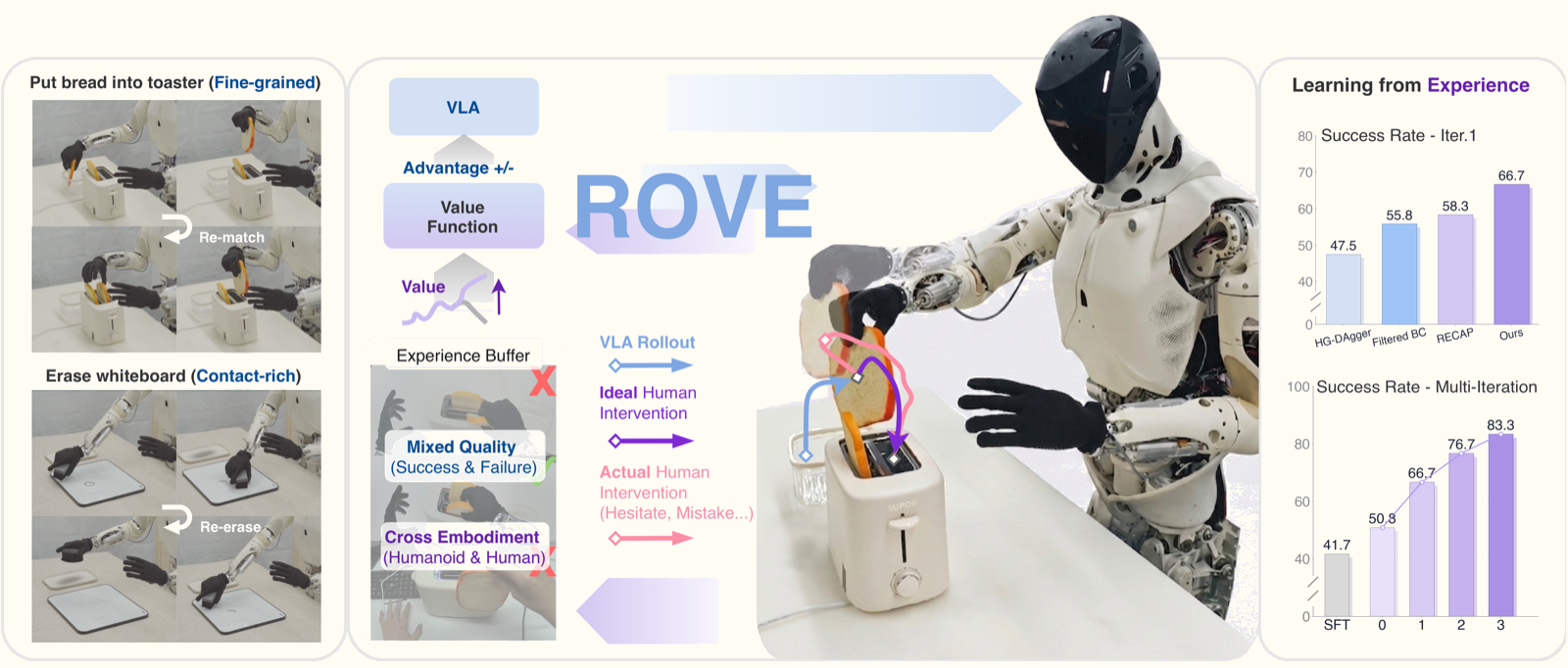
ROVE: VLA-RL với vòng phản hồi người dùng cho humanoid
12 min readNEW - 3
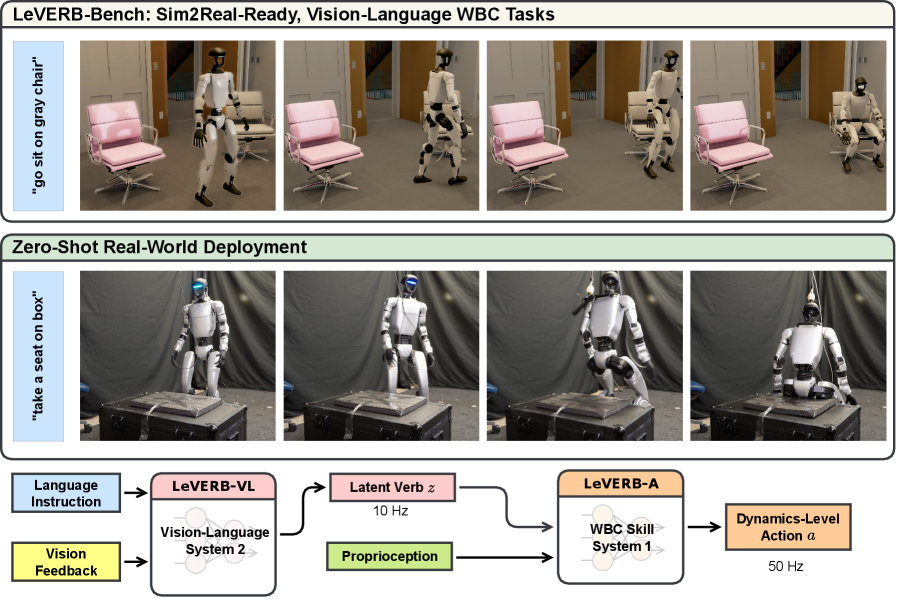
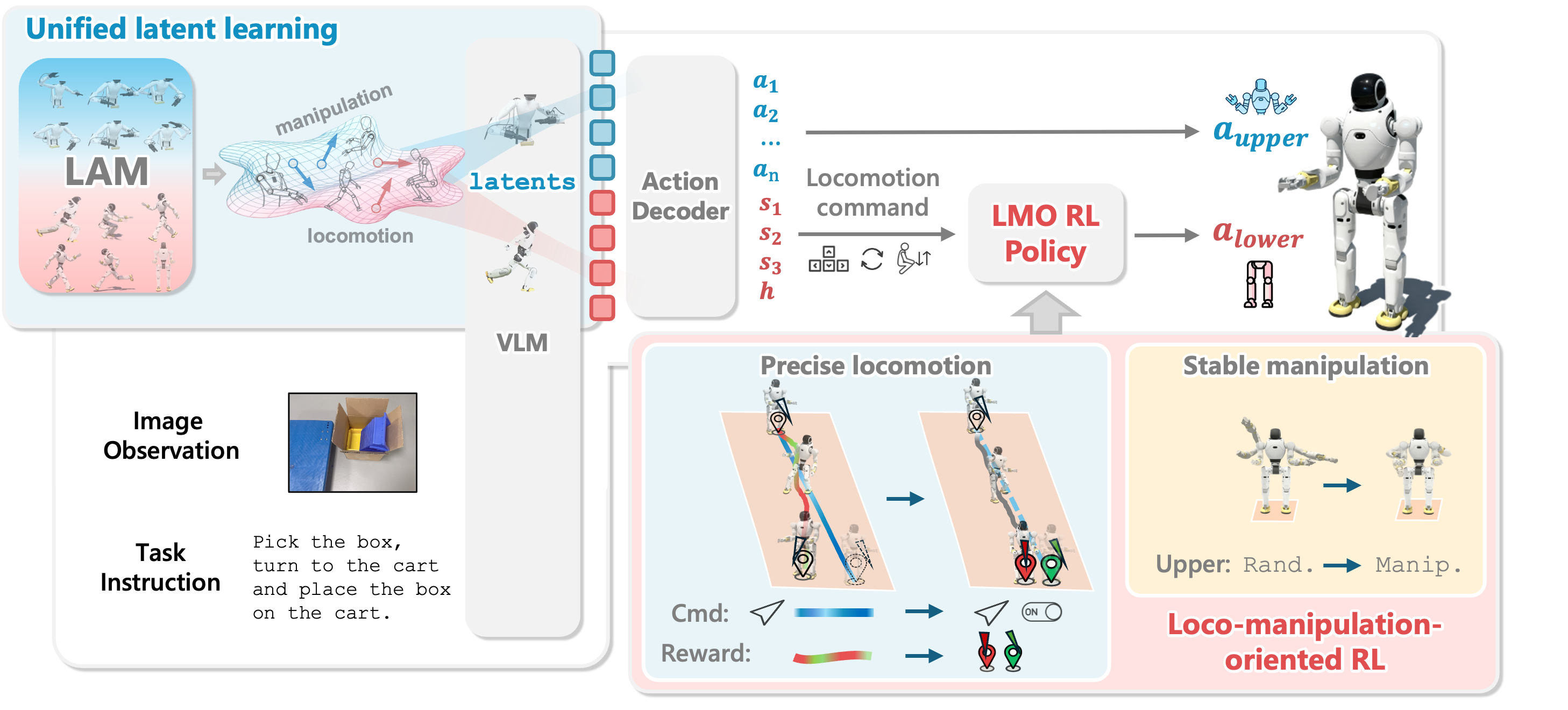
LeVERB: Benchmark WBC-VLA đầu tiên với Latent Action Space
15 min readNEW - 4
LeVERB: Điều khiển toàn thân humanoid bằng ngôn ngữ-thị giác tiềm ẩn
13 min readNEW - 5
ROVE: Human Intervention làm RL Signal cho VLA Humanoid
12 min readNEW
Blog

wholebody-vla
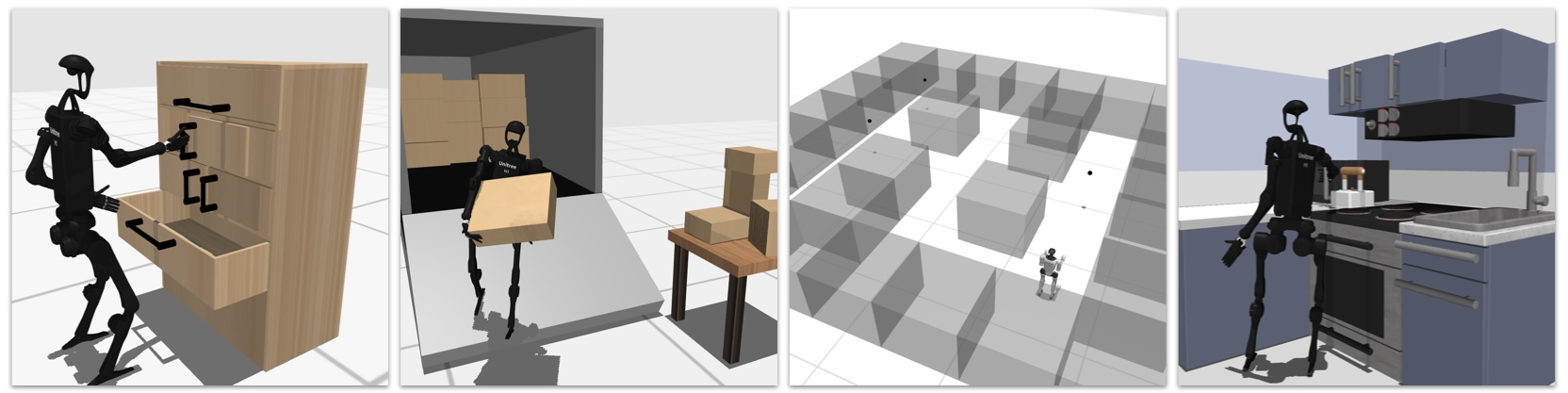
LeVERB: Điều khiển toàn thân humanoid bằng ngôn ngữ-thị giác tiềm ẩn
24/6/202613 phút đọc
NT