GR00T N1 + G1 (Bài 3): fine-tune GR00T N1 — GPU, config, training script
Đây là bài 3 trong series GR00T N1 + Unitree G1. Bài trước thu được LeRobot dataset. Bài này: chạy fine-tune GR00T N1 2B params với dataset đó.
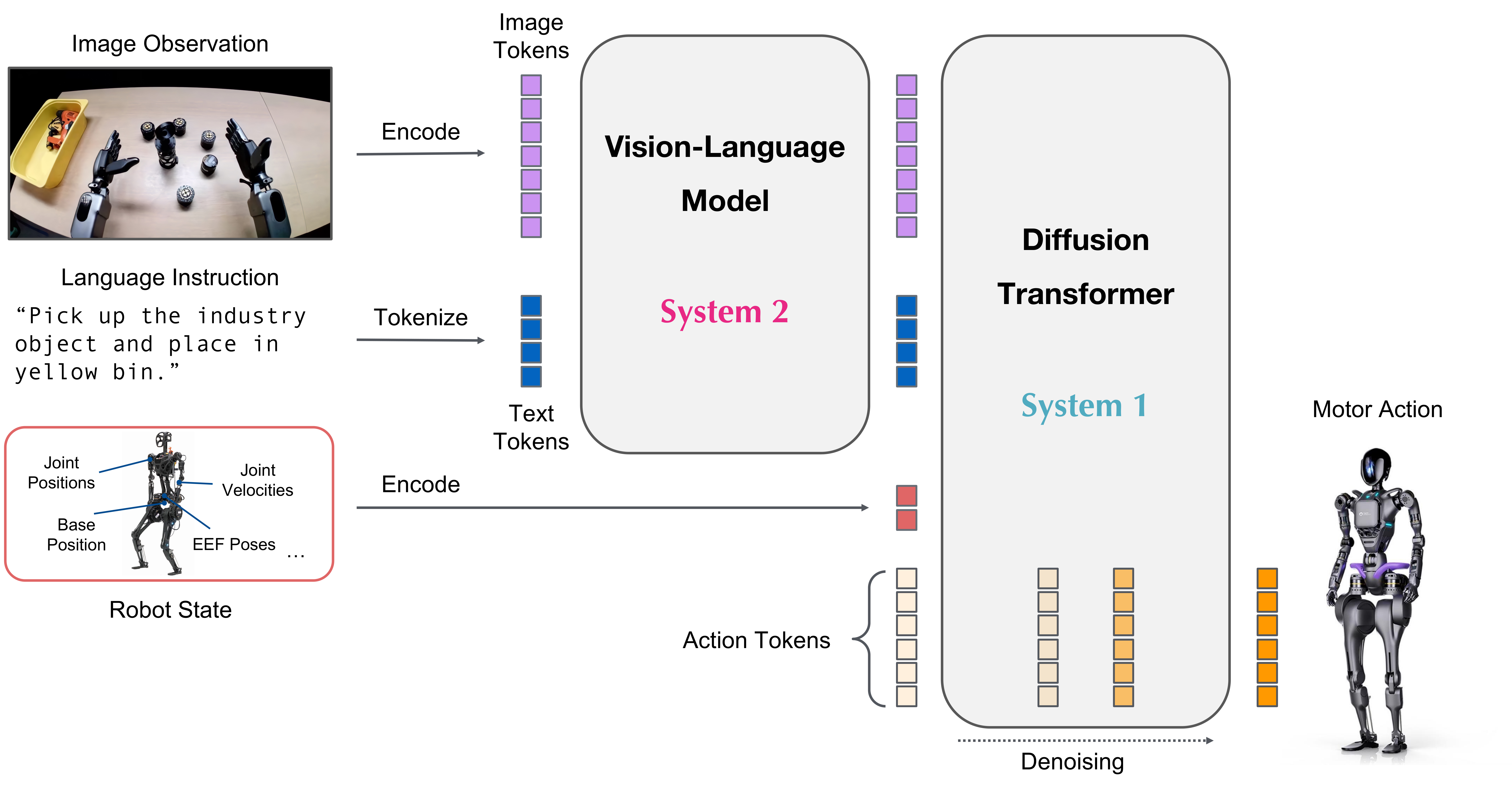
GR00T N1 là pretrained foundation model — nó đã biết nhiều task chung. Fine-tune chỉ cần dạy nó task cụ thể của bạn trên robot cụ thể. Với 50-100 demos, training thường mất 2-4 giờ trên RTX 4090.
GPU requirements thực tế
| Setup | VRAM | Batch size | Training time (50 demos) |
|---|---|---|---|
| RTX 4090 | 24GB | 8 | ~3 giờ |
| A100 40GB | 40GB | 16 | ~1.5 giờ |
| A100 80GB | 80GB | 32 | ~45 phút |
| 2× RTX 4090 | 48GB | 16 | ~1.5 giờ (DDP) |
Minimum: RTX 4090 (24GB). Dưới 24GB VRAM sẽ bị OOM với default config. Có thể dùng gradient checkpointing để giảm VRAM nhưng training sẽ chậm hơn ~40%.
Cài đặt môi trường training
git clone https://github.com/NVIDIA/Isaac-GR00T.git
cd Isaac-GR00T
# Tạo conda environment
conda create -n groot python=3.10
conda activate groot
# Cài dependencies
pip install -e ".[train]"
# Verify CUDA + torch
python -c "import torch; print(torch.cuda.get_device_name(0)); print(torch.version.cuda)"
# Download GR00T N1 pretrained checkpoint
python scripts/download_model.py --model GR00T-N1-2B
# checkpoint sẽ về: ./checkpoints/GR00T-N1-2B/
Config file
GR00T dùng YAML config. Tạo file config cho task của bạn:
# configs/finetune_g1_pickplace.yaml
# Model
model:
name: "GR00T-N1-2B"
checkpoint_path: "./checkpoints/GR00T-N1-2B"
freeze_vision_encoder: false # true để train nhanh hơn, false cho accuracy tốt hơn
freeze_language_model: true # LUÔN freeze LM để tiết kiệm VRAM
# Dataset
dataset:
path: "./data/g1_pickplace_lerobot"
robot: "g1"
cameras:
- "observation.images.left_wrist"
- "observation.images.right_wrist"
- "observation.images.head" # bỏ nếu không có head camera
action_keys:
- "action/left_ee_pose" # 7-dim: xyz + quat
- "action/right_ee_pose" # 7-dim
- "action/gripper" # 2-dim: left, right
# Train/val split
train_split: 0.9
val_split: 0.1
# Training hyperparams
training:
batch_size: 8 # giảm xuống 4 nếu OOM
learning_rate: 1.0e-4
lr_scheduler: "cosine"
warmup_steps: 100
num_epochs: 100
gradient_clip: 1.0
# Gradient checkpointing — bật nếu VRAM < 24GB
gradient_checkpointing: false
# Mixed precision
bf16: true # A100 dùng bf16; RTX 4090 dùng fp16
fp16: false
# Action head — flow matching
action_head:
num_timesteps: 100 # denoising steps (10 cho fast inference)
action_chunk_size: 16 # predict 16 steps ahead
# Logging
output_dir: "./runs/g1_pickplace"
log_every: 10 # log loss mỗi 10 steps
eval_every: 500 # evaluate trên val set mỗi 500 steps
save_every: 500 # save checkpoint mỗi 500 steps
Chạy training
# Single GPU
python scripts/finetune.py \
--config configs/finetune_g1_pickplace.yaml
# Multi-GPU (2× RTX 4090)
torchrun --nproc_per_node=2 scripts/finetune.py \
--config configs/finetune_g1_pickplace.yaml
# Xem training logs
tensorboard --logdir ./runs/g1_pickplace/tensorboard
Output trong terminal:
Epoch 1/100 | Step 50/500 | Loss: 0.342 | Action loss: 0.298 | LR: 8.3e-5
Epoch 1/100 | Step 100/500 | Loss: 0.241 | Action loss: 0.198 | LR: 1.0e-4
...
[Eval] Step 500 | Val loss: 0.187 | Saved checkpoint: ./runs/g1_pickplace/checkpoint_500/
Theo dõi training — khi nào stop?
Loss curve bình thường:
Train loss: 0.35 → 0.20 → 0.12 → 0.09 → 0.07 (giảm đều)
Val loss: 0.33 → 0.19 → 0.13 → 0.10 → 0.08 (theo sát train)
Dấu hiệu overfitting — stop sớm:
Train loss: 0.35 → 0.15 → 0.08 → 0.04 → 0.02 (giảm rất nhanh)
Val loss: 0.33 → 0.18 → 0.16 → 0.18 → 0.22 (bắt đầu tăng lại)
Khi val loss tăng 3 eval liên tiếp → dùng checkpoint trước đó (early stopping).
Adapt config cho robot khác
Thay robot: "g1" và action_keys theo robot của bạn:
# Ví dụ cho GR1 (Fourier Intelligence)
dataset:
robot: "gr1"
cameras:
- "observation.images.left_wrist"
- "observation.images.right_wrist"
action_keys:
- "action/left_ee_pose"
- "action/right_ee_pose"
- "action/gripper"
# Ví dụ cho robot arm đơn (không phải humanoid)
dataset:
robot: "franka"
cameras:
- "observation.images.wrist"
- "observation.images.overhead"
action_keys:
- "action/ee_pose" # 7-dim
- "action/gripper" # 1-dim
GR00T N1 hỗ trợ variable action dimension — chỉ cần khai báo đúng action_keys.
Evaluate checkpoint trong sim
Trước khi deploy lên robot thật, luôn evaluate trong sim:
# Rollout checkpoint trong Isaac Lab
python scripts/evaluate_checkpoint.py \
--checkpoint ./runs/g1_pickplace/checkpoint_best/ \
--robot g1 \
--task PickPlace \
--num_episodes 20 \
--render # hiện Isaac Sim GUI
# Output:
# Episode 0: SUCCESS (12.3s)
# Episode 1: SUCCESS (11.8s)
# Episode 2: FAIL — gripper missed object at step 45
# ...
# Success rate: 17/20 = 85%
Threshold trước khi deploy real: ≥ 80% success rate trong sim cho task đơn giản (pick-place). Tasks phức tạp hơn có thể thấp hơn nhưng phải có trend cải thiện.
Troubleshooting thường gặp
OOM (Out of Memory):
# Giảm batch size
training:
batch_size: 4 # từ 8 xuống 4
# Hoặc bật gradient checkpointing
gradient_checkpointing: true
# Hoặc freeze vision encoder
model:
freeze_vision_encoder: true
Loss không giảm sau 20 epochs:
# Thử tăng learning rate
training:
learning_rate: 3.0e-4 # từ 1e-4 lên 3e-4
# Hoặc unfreeze vision encoder
model:
freeze_vision_encoder: false
Val loss tốt nhưng sim performance tệ: → Dataset quality issue. Xem lại demos: có demo fail trong dataset không? Vị trí object có đủ diverse không? Camera calibration đúng chưa?
Best checkpoint: checkpoint_best vs checkpoint_last
Script tự động lưu checkpoint_best (val loss thấp nhất) và checkpoint_last (epoch cuối).
ls ./runs/g1_pickplace/
# checkpoint_500/ checkpoint_1000/ checkpoint_best/ checkpoint_last/
# Dùng checkpoint_best cho deploy
python scripts/evaluate_checkpoint.py \
--checkpoint ./runs/g1_pickplace/checkpoint_best/
Luôn dùng checkpoint_best — không phải checkpoint_last. Training thêm không phải lúc nào cũng tốt hơn.
Bài tiếp theo: Deploy GR00T-WBC trên G1 thật — GEAR + SONIC.