Ở Phần 2, bạn đã nắm Topics, Services và Actions — cách các node nói chuyện với nhau. Nhưng một hệ thống robot thật có hàng chục node, mỗi node cần cấu hình (tốc độ tối đa, cổng serial, tần số…), cần được khởi động cùng lúc theo đúng thứ tự, và đôi khi cần bật/tắt có kiểm soát. Đó là ba công cụ của bài này: Parameters, Launch files, và Lifecycle nodes.
Phiên bản (6/2026): Dùng ROS 2 Jazzy (Ubuntu 24.04). Mọi ví dụ có cả C++ (
rclcpp) và Python (rclpy). Trên Humble đổijazzy→humble.
1. Parameters — cấu hình node mà không sửa code
Hãy tưởng tượng node điều khiển motor của bạn có tốc độ tối đa max_speed = 0.5. Nếu hard-code số này, mỗi lần đổi robot bạn phải sửa code và build lại. Parameters cho phép đặt giá trị này từ ngoài — qua dòng lệnh, file YAML, hoặc lúc runtime.
Khai báo và đọc parameter
Python (rclpy):
# minimal_param.py
import rclpy
from rclpy.node import Node
class ParamDemo(Node):
def __init__(self):
super().__init__('param_demo')
# Khai báo parameter với giá trị mặc định
self.declare_parameter('max_speed', 0.5)
self.declare_parameter('robot_name', 'turtle')
# Đọc giá trị
speed = self.get_parameter('max_speed').value
name = self.get_parameter('robot_name').value
self.get_logger().info(f'{name} chạy tối đa {speed} m/s')
def main():
rclpy.init()
rclpy.spin(ParamDemo())
rclpy.shutdown()
C++ (rclcpp):
// minimal_param.cpp
#include "rclcpp/rclcpp.hpp"
class ParamDemo : public rclcpp::Node
{
public:
ParamDemo() : Node("param_demo")
{
// Khai báo parameter với giá trị mặc định
this->declare_parameter<double>("max_speed", 0.5);
this->declare_parameter<std::string>("robot_name", "turtle");
double speed = this->get_parameter("max_speed").as_double();
std::string name = this->get_parameter("robot_name").as_string();
RCLCPP_INFO(this->get_logger(), "%s chạy tối đa %.2f m/s",
name.c_str(), speed);
}
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<ParamDemo>());
rclcpp::shutdown();
}
Đặt parameter từ ngoài
# Đặt trực tiếp khi chạy node
ros2 run my_pkg param_demo --ros-args -p max_speed:=1.2 -p robot_name:=amr_01
# Xem tất cả parameter của một node
ros2 param list /param_demo
# Đọc/ghi runtime
ros2 param get /param_demo max_speed
ros2 param set /param_demo max_speed 0.8
File parameter YAML
Với nhiều parameter, dùng file YAML gọn hơn:
# config/robot_params.yaml
param_demo:
ros__parameters:
max_speed: 1.0
robot_name: "amr_warehouse"
pid:
kp: 1.2
ki: 0.05
kd: 0.1
ros2 run my_pkg param_demo --ros-args --params-file config/robot_params.yaml
Parameter callback — phản ứng khi giá trị đổi
Điều mạnh nhất: node tự cập nhật khi parameter thay đổi runtime (không cần restart).
Python:
from rcl_interfaces.msg import SetParametersResult
class ParamDemo(Node):
def __init__(self):
super().__init__('param_demo')
self.declare_parameter('max_speed', 0.5)
self.max_speed = self.get_parameter('max_speed').value
# Đăng ký callback
self.add_on_set_parameters_callback(self.on_param_change)
def on_param_change(self, params):
for p in params:
if p.name == 'max_speed' and p.value > 0:
self.max_speed = p.value
self.get_logger().info(f'max_speed cập nhật: {p.value}')
return SetParametersResult(successful=True)
Mẹo thực tế: Luôn validate trong callback (vd
max_speed > 0). Nếu trảsuccessful=False, ROS 2 từ chối giá trị xấu — robot không bị set tốc độ âm do gõ nhầm.
2. Launch files — khởi động cả hệ thống bằng một lệnh
Một AMR cần chạy: driver LiDAR, node odometry, robot_state_publisher, node điều khiển… Gõ ros2 run từng cái rất mệt. Launch file khởi động tất cả cùng lúc, truyền parameter, và remap topic — chỉ bằng một lệnh.
ROS 2 dùng launch file viết bằng Python (linh hoạt hơn XML của ROS 1).
# launch/robot_bringup.launch.py
import os
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
pkg = get_package_share_directory('my_pkg')
params_file = os.path.join(pkg, 'config', 'robot_params.yaml')
# Tham số dòng lệnh: ros2 launch ... use_sim_time:=true
use_sim_time = LaunchConfiguration('use_sim_time')
return LaunchDescription([
DeclareLaunchArgument('use_sim_time', default_value='false'),
# Node điều khiển motor — nạp param từ YAML
Node(
package='my_pkg',
executable='param_demo',
name='param_demo',
parameters=[params_file, {'use_sim_time': use_sim_time}],
output='screen',
),
# Node sensor — remap topic /scan → /lidar/scan
Node(
package='my_pkg',
executable='lidar_node',
remappings=[('/scan', '/lidar/scan')],
),
])
# Chạy cả hệ thống
ros2 launch my_pkg robot_bringup.launch.py use_sim_time:=true
Include launch khác
Tái sử dụng launch file của package khác (vd Nav2) bằng IncludeLaunchDescription:
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
nav2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(get_package_share_directory('nav2_bringup'),
'launch', 'navigation_launch.py')),
launch_arguments={'use_sim_time': 'true'}.items(),
)
Đây chính là cách ta sẽ ghép Nav2 vào robot ở Phần 6.
3. Lifecycle nodes — node có vòng đời quản lý được
Node thường (rclcpp::Node) khởi động là chạy ngay. Nhưng với phần cứng quan trọng (driver LiDAR, motor), bạn muốn kiểm soát: cấu hình trước, kích hoạt sau, tắt an toàn. Đó là Lifecycle node (managed node).
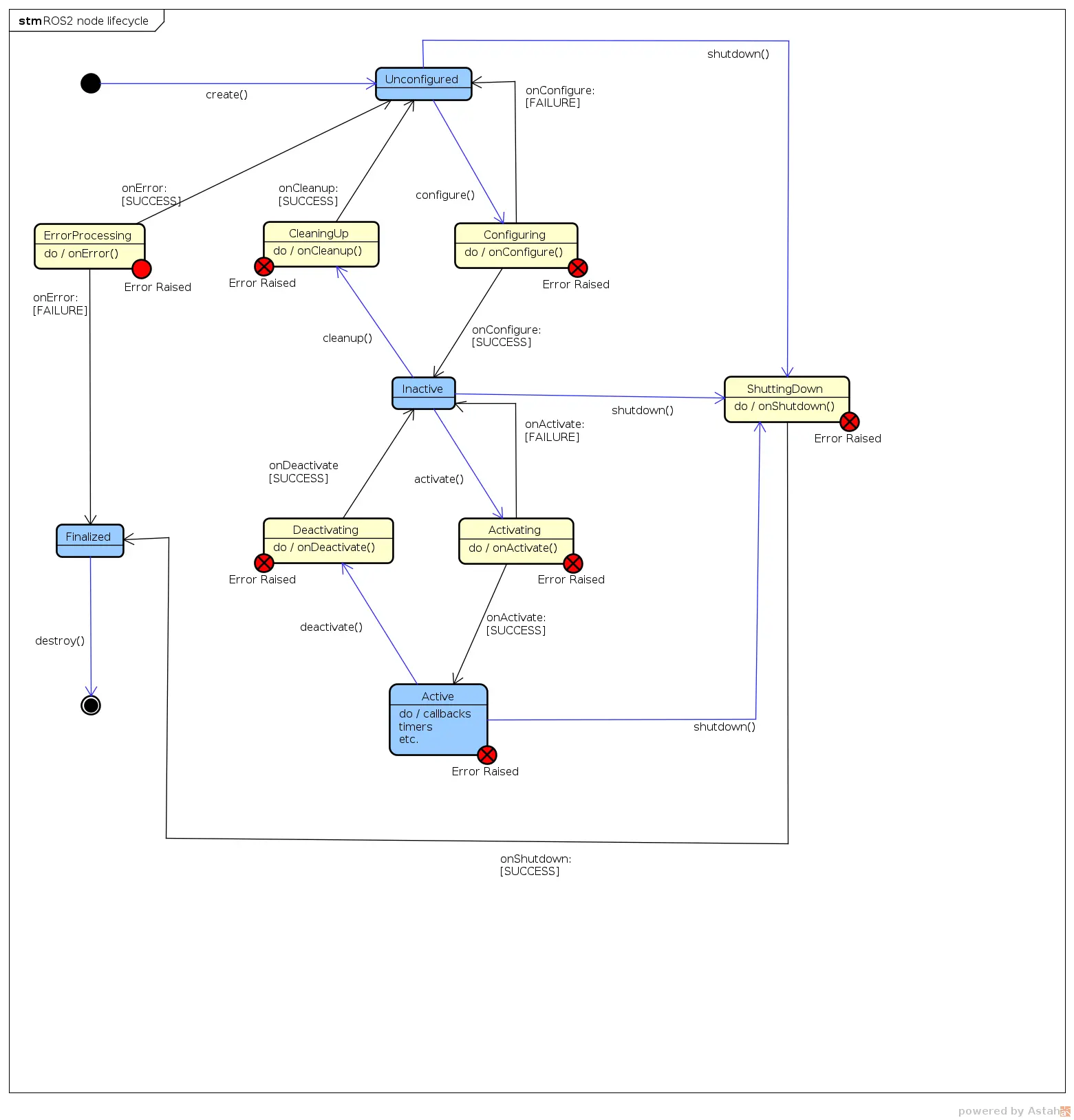
Một lifecycle node có 4 trạng thái chính, chuyển đổi qua các transition:
┌──────────────┐ configure ┌──────────┐ activate ┌────────┐
│ Unconfigured │ ───────────► │ Inactive │ ──────────► │ Active │
└──────────────┘ └──────────┘ ◄────────── └────────┘
▲ │ deactivate
└───────────────────────────┘
cleanup
- Unconfigured: vừa tạo, chưa làm gì.
- Inactive: đã cấu hình (mở file, cấp phát buffer) nhưng chưa xử lý dữ liệu.
- Active: đang chạy thật — publish, đọc sensor.
- Finalized: đã shutdown.
Vì sao hữu ích: với một fleet robot, bạn có thể configure tất cả driver, kiểm tra mọi thứ OK, rồi mới activate đồng loạt — tránh tình trạng node A chạy trước khi node B sẵn sàng.
Python (rclpy lifecycle):
import rclpy
from rclpy.lifecycle import Node, State, TransitionCallbackReturn
class LidarDriver(Node):
def __init__(self):
super().__init__('lidar_driver')
def on_configure(self, state: State) -> TransitionCallbackReturn:
# Mở cổng serial, cấp phát buffer — CHƯA publish
self.get_logger().info('Configuring: mở /dev/ttyUSB0')
self._pub = self.create_lifecycle_publisher(...) # ví dụ
return TransitionCallbackReturn.SUCCESS
def on_activate(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Activating: bắt đầu đọc LiDAR')
return super().on_activate(state)
def on_deactivate(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Deactivating: tạm dừng')
return super().on_deactivate(state)
def on_cleanup(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Cleanup: đóng serial')
return TransitionCallbackReturn.SUCCESS
C++ (rclcpp_lifecycle):
#include "rclcpp_lifecycle/lifecycle_node.hpp"
using CallbackReturn =
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn;
class LidarDriver : public rclcpp_lifecycle::LifecycleNode
{
public:
LidarDriver() : rclcpp_lifecycle::LifecycleNode("lidar_driver") {}
CallbackReturn on_configure(const rclcpp_lifecycle::State &) override
{
RCLCPP_INFO(get_logger(), "Configuring: mở serial");
return CallbackReturn::SUCCESS;
}
CallbackReturn on_activate(const rclcpp_lifecycle::State & s) override
{
LifecycleNode::on_activate(s); // kích hoạt publisher
RCLCPP_INFO(get_logger(), "Activating");
return CallbackReturn::SUCCESS;
}
CallbackReturn on_deactivate(const rclcpp_lifecycle::State & s) override
{
LifecycleNode::on_deactivate(s);
return CallbackReturn::SUCCESS;
}
};
Điều khiển transition từ CLI:
# Xem trạng thái hiện tại
ros2 lifecycle get /lidar_driver
# Chuyển trạng thái
ros2 lifecycle set /lidar_driver configure
ros2 lifecycle set /lidar_driver activate
Khi nào KHÔNG cần lifecycle: node logic đơn giản (một bộ lọc, một bộ chuyển đổi) thì node thường là đủ. Lifecycle đáng dùng cho driver phần cứng và các node mà thứ tự khởi động quan trọng.
Pitfalls thường gặp
- Quên
declare_parametertrước khiget— ROS 2 sẽ báoParameterNotDeclaredException. Luôn declare trước. - Launch file không thấy node — chưa
colcon buildlại sau khi sửasetup.py/CMakeLists.txt, hoặc chưa sourceinstall/setup.bash. - Param YAML sai tên node — key trong YAML phải khớp
namecủa node (hoặc dùng/**wildcard để áp cho mọi node). - Lifecycle publisher không ra dữ liệu — quên gọi
super().on_activate(); publisher của lifecycle node chỉ phát khi ở trạng thái Active.
Tổng kết
Bài này cho bạn 3 công cụ vận hành hệ thống ROS 2 thực tế:
- Parameters — cấu hình node từ ngoài, đổi runtime, có validation.
- Launch files — khởi động cả hệ thống, truyền param, remap, include launch khác.
- Lifecycle nodes — quản lý vòng đời node phần cứng có kiểm soát.
Ở Phần 4, ta sẽ mô tả hình dạng robot bằng URDF, theo dõi quan hệ toạ độ giữa các bộ phận bằng TF2, và nhìn tất cả trong RViz2.
Bài viết liên quan
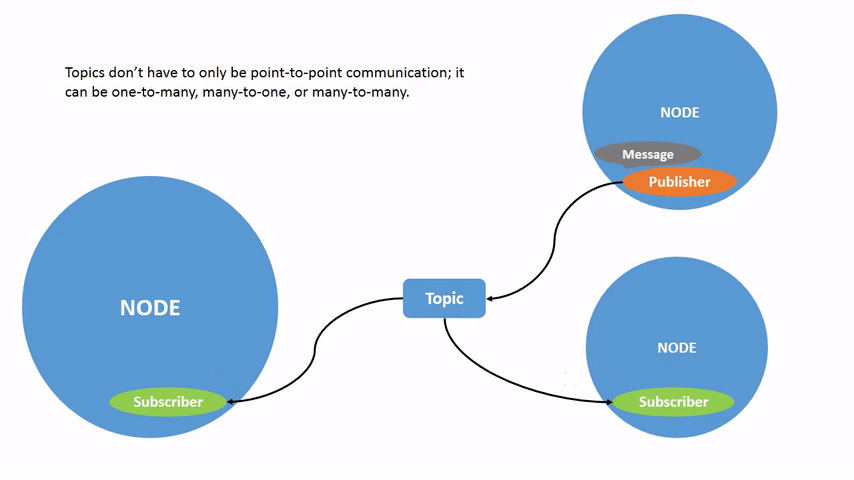
- ROS 2 từ A đến Z (P2): Topics, Services và Actions — Cách node giao tiếp
- ROS 2 từ A đến Z (P4): TF2, URDF và RViz2 — Mô tả & hình dung robot
- ROS 2 từ A đến Z (P5): ros2_control và Hardware — Dùng parameter & launch cho phần cứng