Từ Classical đến RL: Bước ngoặt của Locomotion
Trong Part 1, chúng ta đã tìm hiểu các phương pháp classical (ZMP, CPG, IK) và tại sao chúng bị hạn chế. Bây giờ là lúc đi vào RL-based locomotion -- phương pháp đang thống trị toàn bộ ngành robot di chuyển kể từ 2020.
Ý tưởng cốt lõi cực kỳ đơn giản: thay vì hand-craft controller, để robot tự học cách đi bằng trial-and-error trong simulation. Nhưng "đơn giản" không có nghĩa là "dễ" -- có rất nhiều decisions quan trọng cần hiểu rõ.

MDP cho Walking: Formulation bài toán
Locomotion được formulate như một Markov Decision Process (MDP). Nếu bạn chưa quen thuộc với MDP, đọc RL cơ bản cho Robotics trước.
Observation Space -- Robot "nhìn thấy" gì?
Observation là tất cả thông tin mà policy nhận được để ra quyết định. Đối với locomotion, observation thường bao gồm:
observation_space = {
# === Proprioception (cam nhan co the) ===
"base_angular_velocity": 3, # gyroscope (roll, pitch, yaw rates)
"projected_gravity": 3, # huong trong luc trong body frame
"joint_positions": 12, # goc cua 12 joints (3 joints x 4 chan)
"joint_velocities": 12, # van toc goc cua 12 joints
# === Commands (lenh dieu khien) ===
"velocity_command": 3, # (vx, vy, yaw_rate) mong muon
# === History (lich su) ===
"previous_actions": 12, # action truoc do
# TONG: 45 dimensions
}
Tại sao không dùng visual input? Hầu hết locomotion policies chỉ dùng proprioception (joint angles, IMU) mà không dùng camera. Lý do:
- Proprioception đủ để đi trên nhiều địa hình (robot "cảm nhận" mặt đất qua chân)
- Visual input tăng observation dimension lên hàng nghìn → training chậm hơn
- Camera có latency, noise, và sim-to-real gap lớn
Tuy nhiên, các paper mới như "Learning Robust Perceptive Locomotion for Quadrupedal Robots in the Wild" (arXiv:2201.08117) đã bắt đầu kết hợp depth camera + proprioception để xử lý địa hình phức tạp hơn (cầu thang, gập ghềnh).
Action Space -- Robot làm gì?
Action space xác định robot điều khiển joints như thế nào:
| Kiểu action | Mô tả | Ưu điểm | Nhược điểm |
|---|---|---|---|
| Joint position targets | Policy output góc joints mong muốn | Ổn định, dễ sim-to-real | Không trực tiếp control lực |
| Joint torques | Policy output moment lực trên joints | Control chính xác | Khó train, khó transfer |
| Position offsets | Output delta từ default standing pose | Train nhanh hơn position tuyệt đối | Cần default pose tốt |
Phổ biến nhất hiện nay: Position offsets + PD controller. Policy output delta góc joints, PD controller chuyển thành torques:
# Action -> Joint torques (chay tren robot)
def pd_controller(target_pos, current_pos, current_vel, kp=40.0, kd=2.0):
"""
PD controller chuyen position targets thanh torques
kp, kd: proportional va derivative gains
"""
torque = kp * (target_pos - current_pos) - kd * current_vel
return np.clip(torque, -33.5, 33.5) # torque limit
# Trong training loop
default_pose = np.array([0.0, 0.8, -1.6] * 4) # standing pose cho 4 chan
action = policy(observation) # output: 12 position offsets
target_positions = default_pose + action * action_scale # scale action
torques = pd_controller(target_positions, current_joint_pos, current_joint_vel)
Reward Shaping -- Nghệ thuật thiết kế reward
Reward function là phần quan trọng nhất của locomotion RL. Một reward function tốt tạo ra robot đi mượt mà; một reward function tệ tạo ra robot run rẩy, nhảy nhót, hoặc lãng biến suất năng lượng.
Reward components
Reward function cho locomotion thường là tổng có trọng của nhiều components:
def compute_reward(env):
"""
Reward function cho quadruped locomotion
Moi component co weight rieng -- tuning weights la nghe thuat
"""
rewards = {}
# === Rewards (khuyen khich) ===
# 1. Tracking van toc lenh
lin_vel_error = (env.commands[:, :2] - env.base_lin_vel[:, :2]).square().sum(dim=1)
rewards["tracking_lin_vel"] = torch.exp(-lin_vel_error / 0.25) * 1.5
ang_vel_error = (env.commands[:, 2] - env.base_ang_vel[:, 2]).square()
rewards["tracking_ang_vel"] = torch.exp(-ang_vel_error / 0.25) * 0.5
# === Penalties (phat) ===
# 2. Energy -- phat tieu hao nang luong
rewards["torques"] = -torch.sum(env.torques.square(), dim=1) * 0.00001
# 3. Smoothness -- phat thay doi action dot ngot
rewards["action_rate"] = -torch.sum(
(env.actions - env.last_actions).square(), dim=1
) * 0.01
# 4. Air time -- khuyen khich chan roi khoi mat dat (foot clearance)
contact = env.foot_contacts # True neu chan cham dat
first_contact = (env.feet_air_time > 0.) * contact
rewards["feet_air_time"] = torch.sum(
(env.feet_air_time - 0.5) * first_contact, dim=1
) * 1.0
# 5. Orientation -- phat nghieng qua nhieu
rewards["orientation"] = -torch.sum(
env.projected_gravity[:, :2].square(), dim=1
) * 0.2
# 6. Joint limits -- phat khi joint gan limit
rewards["joint_limits"] = -torch.sum(
(env.dof_pos - env.dof_pos_limits[:, 0]).clip(max=0.).square() +
(env.dof_pos - env.dof_pos_limits[:, 1]).clip(min=0.).square(),
dim=1
) * 10.0
# 7. Collision -- phat khi body cham mat dat (khong phai chan)
rewards["collision"] = -torch.sum(
(torch.norm(env.contact_forces[:, env.penalized_bodies, :], dim=-1) > 0.1),
dim=1
).float() * 1.0
# Tong reward
total_reward = sum(rewards.values())
return total_reward, rewards
Reward design tips từ kinh nghiệm
| Tip | Giải thích |
|---|---|
| Exponential tracking reward | Dùng exp(-error/sigma) thay vì -error. Cho gradient tốt hơn khi error lớn |
| Balance reward weights | Tracking reward nên lớn nhất (~1.5), penalties nên nhỏ (~0.001-0.1) |
| Feet air time | Reward này cực kỳ quan trọng -- không có nó, robot sẽ kéo chân trên mặt đất |
| Action rate penalty | Ngầm smooth movement, tránh robot giật giật |
| Base height reward | Thêm nếu robot hay ngồi xổm -- khuyến khích đứng thẳng |

Curriculum Learning -- Từ dễ đến khó
Một trong những breakthrough lớn nhất cho locomotion RL là curriculum learning -- bắt đầu train trên địa hình dễ, rồi tăng độ khó dần. Không có curriculum, robot phải học đi trên địa hình khó từ đầu và thường thất bại.
Terrain curriculum
class TerrainCurriculum:
"""
Game-inspired curriculum (tu legged_gym paper)
Robot duoc "len level" khi hoan thanh terrain hien tai
"""
def __init__(self):
self.terrain_levels = {
0: "flat", # mat phang
1: "rough_02", # gho ghe nhe (max height 2cm)
2: "rough_05", # gho ghe vua (max height 5cm)
3: "rough_10", # gho ghe manh (max height 10cm)
4: "slopes_10deg", # doc 10 do
5: "slopes_20deg", # doc 20 do
6: "stairs_10cm", # bac thang 10cm
7: "stairs_15cm", # bac thang 15cm
8: "stepping_stones", # buoc qua da
9: "random_mixed", # ket hop tat ca
}
def update_level(self, robot_id, distance_walked):
"""
Neu robot di duoc xa → len level
Neu robot nga nhieu → giu hoac ha level
"""
if distance_walked > self.threshold_up:
self.levels[robot_id] = min(
self.levels[robot_id] + 1,
self.max_level
)
elif distance_walked < self.threshold_down:
self.levels[robot_id] = max(
self.levels[robot_id] - 1,
0
)
Command curriculum
Ngoài terrain, velocity commands cũng được curriculum hóa:
- Giai đoạn 1: Chỉ command vận tốc thấp (0-0.5 m/s), chỉ đi thẳng
- Giai đoạn 2: Tăng vận tốc (0-1.5 m/s), thêm rẽ trái/phải
- Giai đoạn 3: Vận tốc cao (0-3.0 m/s), thêm đi lui, đi ngang
PPO Training Pipeline với Isaac Lab
Tổng quan pipeline
Isaac Lab Environment
↓
4,096 parallel robots (GPU)
↓
Observations (45 dims x 4096 robots)
↓
PPO Policy (MLP: 512-256-128)
↓
Actions (12 dims x 4096 robots)
↓
Environment step (GPU physics)
↓
Rewards + Terminations
↓
PPO Update (on-policy)
↓
Repeat ~2000 iterations (~20 phut tren RTX 4090)
PPO -- Tại sao là PPO?
Proximal Policy Optimization (Schulman et al., 2017) là algorithm mặc định cho locomotion vì:
- On-policy: Thu thập data mới mỗi iteration, phù hợp với sim nhanh (4096 envs)
- Stable: Clip ratio ngăn policy thay đổi quá lớn, tránh catastrophic forgetting
- Parallel-friendly: RSL-RL implementation tối ưu cho GPU rollout collection
# PPO training config (Isaac Lab / RSL-RL)
ppo_config = {
"policy": {
"class_name": "ActorCritic",
"hidden_dims": [512, 256, 128],
"activation": "elu",
"init_noise_std": 1.0,
},
"algorithm": {
"value_loss_coef": 1.0,
"use_clipped_value_loss": True,
"clip_param": 0.2,
"entropy_coef": 0.01,
"num_learning_epochs": 5,
"num_mini_batches": 4,
"learning_rate": 1e-3,
"schedule": "adaptive", # giam lr khi KL divergence nho
"gamma": 0.99,
"lam": 0.95,
"desired_kl": 0.01,
"max_grad_norm": 1.0,
},
"runner": {
"num_steps_per_env": 24, # rollout length
"max_iterations": 1500,
}
}
Policy architecture
Policy cho locomotion thường là MLP đơn giản -- không cần transformer hay CNN phức tạp:
import torch
import torch.nn as nn
class LocomotionPolicy(nn.Module):
"""
Actor-Critic MLP cho locomotion
Simple nhung hieu qua -- khong can phuc tap hon
"""
def __init__(self, obs_dim=45, action_dim=12):
super().__init__()
# Shared backbone (khong)
# Actor va Critic TACH BIET -- tot hon cho locomotion
self.actor = nn.Sequential(
nn.Linear(obs_dim, 512),
nn.ELU(),
nn.Linear(512, 256),
nn.ELU(),
nn.Linear(256, 128),
nn.ELU(),
nn.Linear(128, action_dim),
)
self.critic = nn.Sequential(
nn.Linear(obs_dim, 512),
nn.ELU(),
nn.Linear(512, 256),
nn.ELU(),
nn.Linear(256, 128),
nn.ELU(),
nn.Linear(128, 1),
)
self.log_std = nn.Parameter(torch.zeros(action_dim))
def forward(self, obs):
action_mean = self.actor(obs)
value = self.critic(obs)
return action_mean, self.log_std.exp(), value
Hands-on: Train với Isaac Lab
# 1. Setup Isaac Lab
git clone https://github.com/isaac-sim/IsaacLab.git
cd IsaacLab && ./isaaclab.sh --install
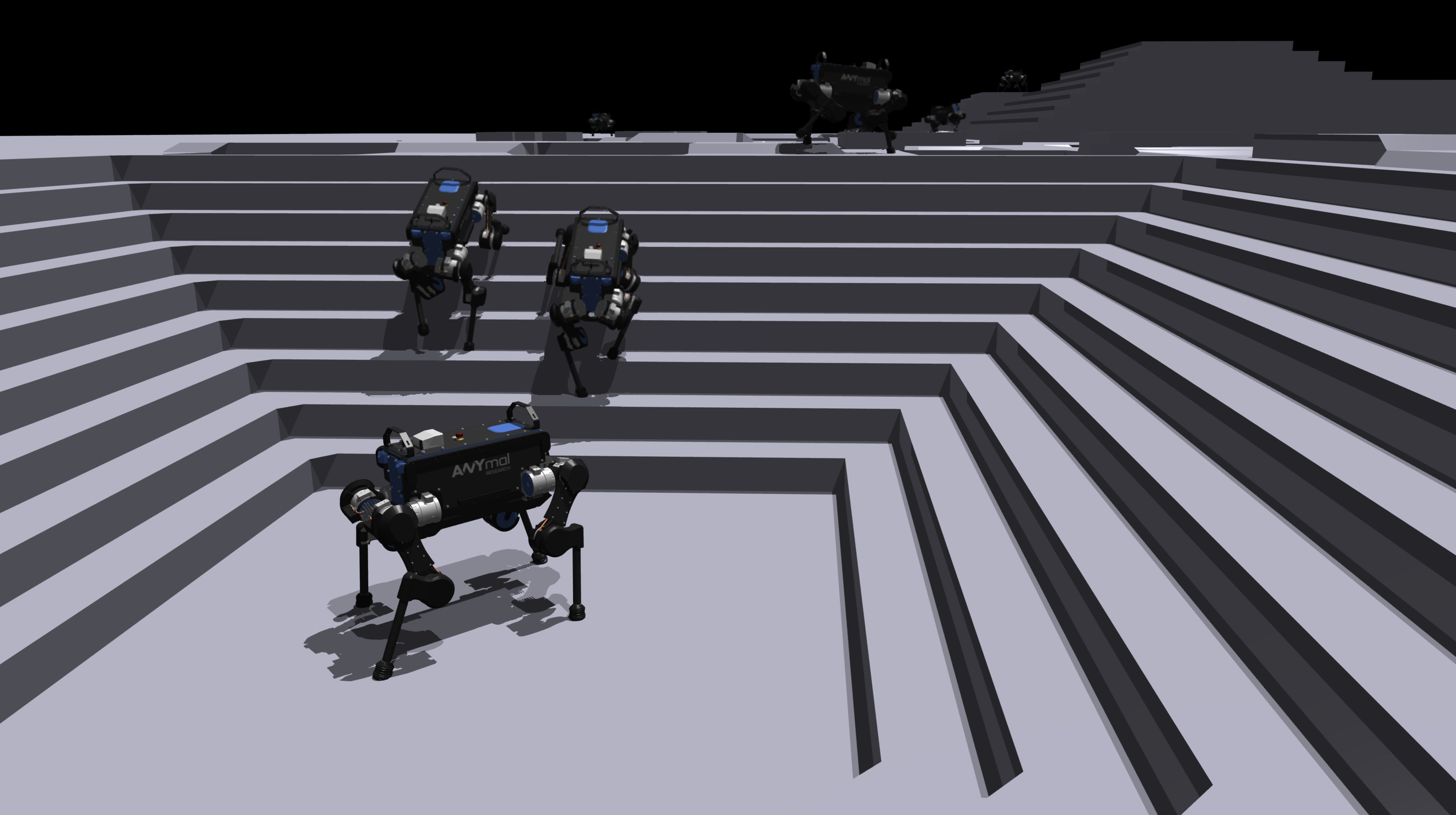
# 2. Train ANYmal locomotion
python source/standalone/workflows/rsl_rl/train.py \
--task Isaac-Velocity-Rough-Anymal-D-v0 \
--num_envs 4096 \
--max_iterations 1500
# 3. Xem ket qua
python source/standalone/workflows/rsl_rl/play.py \
--task Isaac-Velocity-Rough-Anymal-D-v0 \
--num_envs 64
Training mất khoảng 20 phút trên RTX 4090 cho 1500 iterations. Policy hội tụ và robot có thể đi trên rough terrain, leo dốc, và theo dõi velocity commands.
Domain Randomization cho Sim-to-Real
Để policy train trong sim hoạt động trên robot thật, cần domain randomization -- thay đổi ngẫu nhiên các tham số vật lý trong simulation:
domain_randomization = {
# Dynamics randomization
"friction_range": [0.5, 1.25], # he so ma sat
"restitution_range": [0.0, 0.4], # do nay
"added_mass_range": [-1.0, 3.0], # kg them vao base
"com_displacement_range": [-0.15, 0.15], # dich chuyen COM (m)
# Motor randomization
"motor_strength_range": [0.9, 1.1], # sai so motor
"motor_offset_range": [-0.02, 0.02], # offset encoder (rad)
# Observation noise
"joint_pos_noise": 0.01, # rad
"joint_vel_noise": 1.5, # rad/s
"gravity_noise": 0.05, # m/s^2
"imu_noise": 0.2, # rad/s
# Latency
"action_delay_range": [0, 2], # frames delay
}
Với domain randomization, policy học cách robust với uncertainty -- không rely vào bất kỳ tham số cụ thể nào của sim.
Training monitoring -- Biết khi nào policy đang học tốt
| Metric | Ý nghĩa | Giá trị tốt |
|---|---|---|
| Mean reward | Tổng reward trung bình | Tăng đều, hội tụ |
| Mean episode length | Robot sống được bao lâu | Tăng lên max (20s) |
| Tracking error | Sai số giữa command và actual velocity | Giảm về ~0.1 m/s |
| Feet air time | Thời gian chân ở trên không | ~0.3-0.5s (gait tự nhiên) |
| Power consumption | Tiêu hao năng lượng | Giảm dần (hiệu quả hơn) |
Nếu mean episode length không tăng sau 200 iterations, có thể reward function có vấn đề -- kiểm tra lại weights.

So sánh: RL vs Classical cho Locomotion
| Tiêu chí | Classical (ZMP/CPG/IK) | RL (PPO) |
|---|---|---|
| Setup time | Hàng tháng (tuning) | Hàng giờ (reward + train) |
| Terrain generalization | Cần re-plan | Train 1 lần, chạy nhiều terrain |
| Optimality | Sub-optimal | Gần optimal cho reward function |
| Interpretability | Cao (biết robot đang làm gì) | Thấp (black box) |
| Safety guarantees | Có thể chứng minh stability | Không có formal guarantees |
| Compute requirement | CPU đủ | Cần GPU mạnh |
| Sim-to-real | Không cần sim | Cần sim + domain randomization |
Tiếp theo trong series
Bạn đã hiểu cách formulate locomotion như RL problem và toàn bộ training pipeline. Trong các bài tiếp theo:
- Part 3: Quadruped Locomotion: legged_gym đến Unitree Go2 -- Hands-on train và deploy lên robot thật
- Part 4: Walk These Ways: Adaptive locomotion một policy -- Phân tích paper về multi-gait learning
Bài viết liên quan
- Locomotion cơ bản: Từ ZMP đến CPG -- Part 1: nền tảng lý thuyết
- Quadruped Locomotion: legged_gym đến Unitree Go2 -- Part 3 của series
- RL cơ bản cho Robotics: Từ Markov đến PPO -- Nền tảng RL cần biết trước
- NVIDIA Isaac Lab: GPU-accelerated RL training từ zero -- Simulator dùng cho locomotion training
- Sim-to-Real Transfer: Train simulation, chạy thực tế -- Domain randomization và best practices