This is the final post in the 15-part Classical Robot Arm Controller series. We have covered FK/IK and Jacobian, trajectory planning, MoveJ/MoveL/MoveC, blending, motion profiles, jogging and servo control, and collision-aware motion planning with MoveIt2. Now comes the most real-world test: putting everything on a physical robot.
Goal of this article: by the end you will be able to connect ROS 2 to a UR robot (or URSim), send trajectories via joint_trajectory_controller, use ur_rtde from both Python and C++, and have enough logging to debug anything that goes wrong.
The simulation-first philosophy
Golden rule when working with real robots: never run new code directly on hardware. A robot arm weighs tens of kilograms and can move at up to 3 m/s — one wrong command can destroy a fixture, injure someone, or damage the robot.
The standard workflow:
New code → URSim (virtual robot) → thorough testing → real UR robot
URSim is Universal Robots' official simulator that behaves almost identically to a real robot over the network. Code that works on URSim is far safer to transfer to hardware.
Step 1 — Run URSim with Docker
Universal Robots provides an official Docker image — no VirtualBox needed:
# Run URSim for UR5e (e-Series)
docker run --rm -it \
-p 5900:5900 \
-p 6080:6080 \
-p 29999:29999 \
-p 30001-30004:30001-30004 \
-e ROBOT_MODEL=UR5 \
universalrobots/ursim_e-series
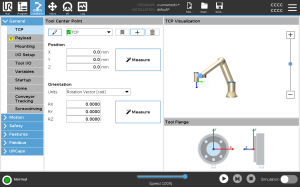
Open a browser at http://localhost:6080/vnc.html — the Polyscope UI appears with the robot in "Normal" state.
Key ports:
| Port | Protocol | Used for |
|---|---|---|
| 30001 | Primary Interface | Robot state, program upload |
| 30002 | Secondary Interface | Program execution |
| 30004 | RTDE | Real-time data exchange (ur_rtde) |
| 29999 | Dashboard Server | Power on/off, brake release |
With the host network mode, URSim's default IP is typically 192.168.56.101.
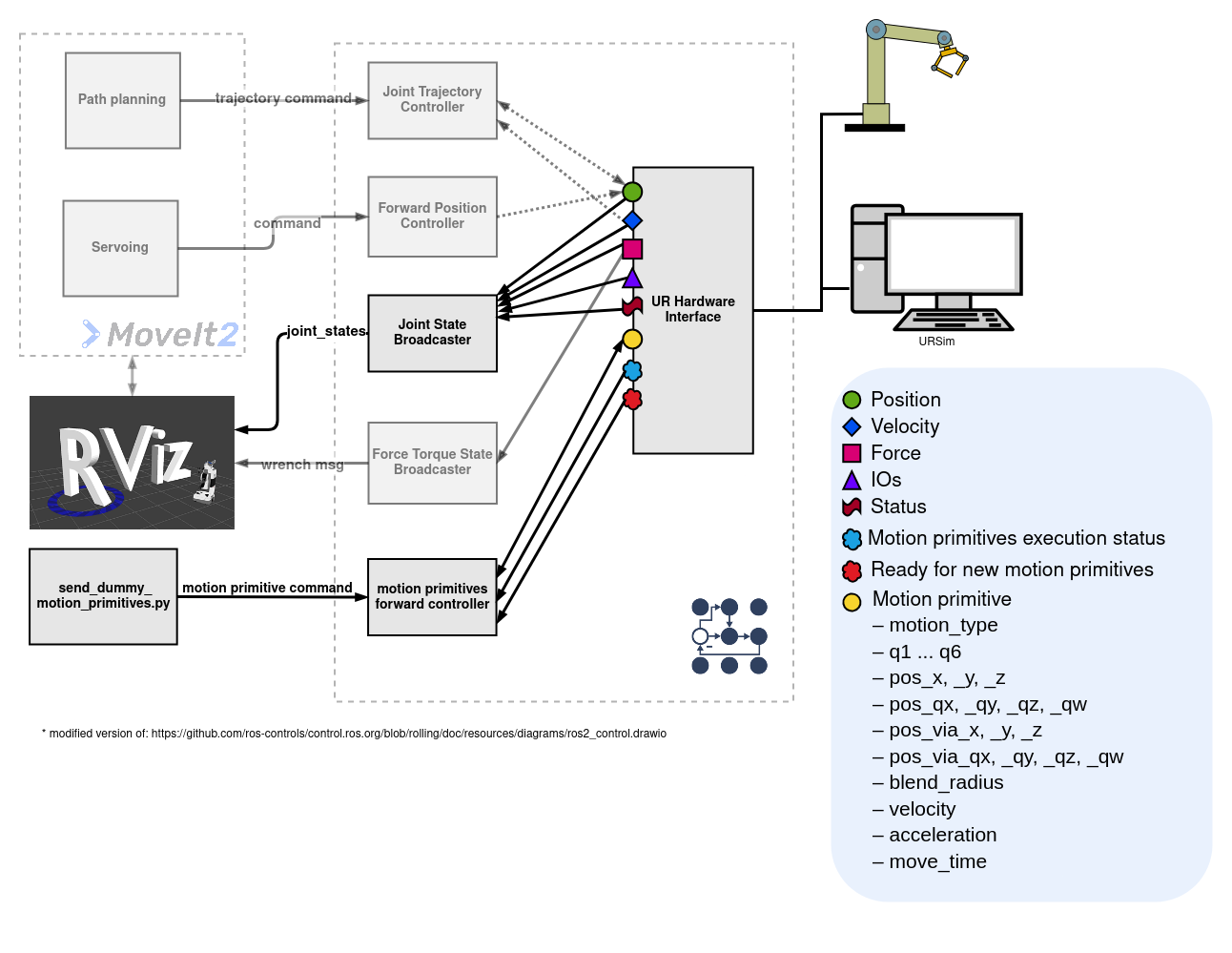
Step 2 — ros2_control architecture
ros2_control is ROS 2's standard hardware abstraction layer. Instead of writing a custom driver for every robot, everything talks through the same interface. UR provides ur_robot_driver as a hardware plugin:
ros2_control stack:
┌──────────────────────────────────────────┐
│ Controller Manager │ ← manages controller lifecycle
├─────────────────────┬────────────────────┤
│ scaled_JTC │ io_status_ctrl │ ← Controllers (plugins)
├─────────────────────┴────────────────────┤
│ Resource Manager │ ← manages hardware resources
├──────────────────────────────────────────┤
│ UrPositionHardwareInterface │ ← ur_robot_driver hardware plugin
├──────────────────────────────────────────┤
│ UR Robot / URSim │ ← real hardware or simulator
└──────────────────────────────────────────┘
scaled_joint_trajectory_controller is the UR driver's default controller. Unlike the standard joint_trajectory_controller, it reads the robot's speed scaling factor (the slider on the Teach Pendant) and respects safety compliance: if the robot hits a safeguard stop, the trajectory pauses in place and resumes exactly where it left off.
Step 3 — Install and launch UR ROS2 Driver
# ROS 2 Humble + Ubuntu 22.04 (recommended)
sudo apt install ros-humble-ur
# Or build from source:
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src
git clone https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver.git
cd ~/ros2_ws && colcon build --packages-select ur_robot_driver
source install/setup.bash
Launch the driver against URSim
# Terminal 1: launch the driver (URSim default IP 192.168.56.101)
ros2 launch ur_robot_driver ur_control.launch.py \
ur_type:=ur5e \
robot_ip:=192.168.56.101 \
launch_rviz:=true
# Fake hardware (no URSim / robot needed):
ros2 launch ur_robot_driver ur_control.launch.py \
ur_type:=ur5e \
robot_ip:=yyy.yyy.yyy.yyy \
use_fake_hardware:=true \
launch_rviz:=true
Important: before the driver can connect to URSim or a real robot, you must:
- Install the "External Control" URCap on Polyscope
- Configure your ROS 2 machine's IP inside the URCap
- Create and run an "External Control" program on the Teach Pendant
After a successful launch, verify the controllers are active:
# Terminal 2
ros2 control list_controllers
Expected output:
scaled_joint_trajectory_controller[...] active
io_and_status_controller[...] active
joint_state_broadcaster[...] active
Step 4 — Send JointTrajectory via ROS 2
trajectory_msgs/JointTrajectory is the standard message for sending trajectories. Each waypoint is a JointTrajectoryPoint with positions, velocities, and time_from_start.
Python — Send via FollowJointTrajectory action
#!/usr/bin/env python3
"""Send a trajectory to the UR robot via ROS 2 action."""
import rclpy
from rclpy.node import Node
from rclpy.action import ActionClient
from control_msgs.action import FollowJointTrajectory
from trajectory_msgs.msg import JointTrajectory, JointTrajectoryPoint
from builtin_interfaces.msg import Duration
import math
class TrajectoryExecutor(Node):
def __init__(self):
super().__init__('trajectory_executor')
self._action_client = ActionClient(
self,
FollowJointTrajectory,
'/scaled_joint_trajectory_controller/follow_joint_trajectory'
)
def send_trajectory(self):
self._action_client.wait_for_server()
self.get_logger().info('Action server ready.')
goal = FollowJointTrajectory.Goal()
goal.trajectory.joint_names = [
'shoulder_pan_joint', 'shoulder_lift_joint',
'elbow_joint', 'wrist_1_joint',
'wrist_2_joint', 'wrist_3_joint'
]
# Waypoint 1: safe home position
p1 = JointTrajectoryPoint()
p1.positions = [0.0, -math.pi/2, 0.0, -math.pi/2, 0.0, 0.0]
p1.velocities = [0.0] * 6
p1.time_from_start = Duration(sec=3, nanosec=0)
# Waypoint 2: pick position (adjust for your actual workspace)
p2 = JointTrajectoryPoint()
p2.positions = [math.pi/4, -math.pi/3, math.pi/2, -math.pi/4, math.pi/2, 0.0]
p2.velocities = [0.0] * 6
p2.time_from_start = Duration(sec=6, nanosec=0)
goal.trajectory.points = [p1, p2]
self.get_logger().info('Sending trajectory goal...')
future = self._action_client.send_goal_async(goal)
rclpy.spin_until_future_complete(self, future)
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().error('Goal rejected!')
return
result_future = goal_handle.get_result_async()
rclpy.spin_until_future_complete(self, result_future)
result = result_future.result().result
self.get_logger().info(f'Done. error_code={result.error_code}')
def main():
rclpy.init()
node = TrajectoryExecutor()
node.send_trajectory()
rclpy.shutdown()
if __name__ == '__main__':
main()
Step 5 — ur_rtde Python: prototype before writing C++
ur_rtde is a low-level library that speaks the RTDE protocol directly (port 30004), no ROS 2 required. Use the Python bindings to validate your motion logic before investing in the C++ implementation.
pip install ur-rtde
moveJ, moveL and tracking error logging
import rtde_control
import rtde_receive
import math
ROBOT_IP = "192.168.56.101" # URSim — swap for real robot IP when deploying
rtde_c = rtde_control.RTDEControlInterface(ROBOT_IP)
rtde_r = rtde_receive.RTDEReceiveInterface(ROBOT_IP)
# Read current state
q_actual = rtde_r.getActualQ()
print(f"Current joints: {[f'{v:.4f}' for v in q_actual]}")
# moveJ — joint-space motion (safe, predictable)
q_target = [0.0, -math.pi/2, math.pi/2, -math.pi/2, -math.pi/2, 0.0]
rtde_c.moveJ(q_target, speed=1.05, acceleration=1.4) # blocking
# Log tracking error right after stop
q_after = rtde_r.getActualQ()
tracking_err = [abs(q_target[i] - q_after[i]) for i in range(6)]
print(f"Tracking error (rad): {[f'{e:.6f}' for e in tracking_err]}")
print(f"Max error: {max(tracking_err):.6f} rad")
# moveL — straight-line TCP motion in Cartesian space
# pose = [x, y, z, rx, ry, rz] — meters + axis-angle (radians)
pose_target = [0.3, -0.4, 0.5, 0.0, math.pi, 0.0]
rtde_c.moveL(pose_target, speed=0.25, acceleration=1.2)
tcp_after = rtde_r.getActualTCPPose()
print(f"TCP after moveL: {[f'{v:.4f}' for v in tcp_after]}")
rtde_c.disconnect()
rtde_r.disconnect()
servoJ — real-time streaming at 500 Hz
import rtde_control
import rtde_receive
import time
import math
rtde_c = rtde_control.RTDEControlInterface(ROBOT_IP)
rtde_r = rtde_receive.RTDEReceiveInterface(ROBOT_IP)
DT = 0.002 # 500 Hz control loop (minimum recommended: 125 Hz)
LOOKAHEAD = 0.1 # Lookahead time (0.03–0.2 s) — higher = smoother but more lag
GAIN = 300 # Servo gain (100–2000) — higher = tighter tracking but more vibration
q_start = rtde_r.getActualQ()
t = 0.0
duration = 3.0
while t < duration:
loop_start = time.time()
# Trajectory: joint 0 oscillates ±0.2 rad (sin wave)
q_cmd = list(q_start)
q_cmd[0] = q_start[0] + 0.2 * math.sin(2 * math.pi * t / duration)
rtde_c.servoJ(q_cmd, velocity=0.0, acceleration=0.0,
dt=DT, lookahead_time=LOOKAHEAD, gain=GAIN)
q_actual = rtde_r.getActualQ()
err = abs(q_cmd[0] - q_actual[0])
loop_ms = (time.time() - loop_start) * 1000
print(f"t={t:.3f}s | cmd={q_cmd[0]:.4f} | act={q_actual[0]:.4f} "
f"| err={err:.4f} rad | loop={loop_ms:.1f}ms")
elapsed = time.time() - loop_start
if elapsed < DT:
time.sleep(DT - elapsed)
t += DT
rtde_c.servoStop()
rtde_c.disconnect()
rtde_r.disconnect()
Step 6 — ur_rtde C++: CMakeLists.txt and implementation
Install ur_rtde from source
git clone https://gitlab.com/sdurobotics/ur_rtde.git
cd ur_rtde && mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j$(nproc)
sudo make install # installs to /usr/local/
CMakeLists.txt
cmake_minimum_required(VERSION 3.16)
project(ur_rtde_controller CXX)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# Find ur_rtde (after sudo make install)
find_package(ur_rtde REQUIRED)
# If installed to a non-standard path:
# find_package(ur_rtde REQUIRED PATHS "/usr/local/lib/cmake/ur_rtde")
add_executable(ur_controller src/ur_controller.cpp)
target_link_libraries(ur_controller PRIVATE ur_rtde::rtde)
Build and run:
mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j$(nproc)
# Connect to URSim
./ur_controller 192.168.56.101
# Real robot (swap IP)
./ur_controller 192.168.1.100
src/ur_controller.cpp — full implementation with logging
#include <ur_rtde/rtde_control_interface.h>
#include <ur_rtde/rtde_receive_interface.h>
#include <iostream>
#include <iomanip>
#include <fstream>
#include <vector>
#include <chrono>
#include <cmath>
#include <algorithm>
#include <thread>
#include <string>
using namespace ur_rtde;
using Clock = std::chrono::high_resolution_clock;
// ── CSV Logger ───────────────────────────────────────────────────────────────
class RobotLogger {
std::ofstream file_;
public:
explicit RobotLogger(const std::string& filename) : file_(filename) {
file_ << "ts_ms,"
<< "j0t,j1t,j2t,j3t,j4t,j5t,"
<< "j0a,j1a,j2a,j3a,j4a,j5a,"
<< "max_err_rad,latency_ms\n";
}
void log(double ts,
const std::vector<double>& target,
const std::vector<double>& actual,
double max_err, double latency) {
file_ << std::fixed << std::setprecision(6) << ts;
for (double v : target) file_ << ',' << v;
for (double v : actual) file_ << ',' << v;
file_ << ',' << max_err << ',' << latency << '\n';
}
};
static double maxError(const std::vector<double>& a,
const std::vector<double>& b) {
double mx = 0.0;
for (std::size_t i = 0; i < a.size(); ++i)
mx = std::max(mx, std::abs(a[i] - b[i]));
return mx;
}
// ── MoveJ with logging ───────────────────────────────────────────────────────
void executeMoveJ(RTDEControlInterface& rtde_c,
RTDEReceiveInterface& rtde_r,
const std::vector<double>& q_target,
double speed = 1.05, double accel = 1.4) {
std::cout << "MoveJ → [";
for (double q : q_target) std::cout << std::setprecision(3) << q << ' ';
std::cout << "]\n";
auto t0 = Clock::now();
rtde_c.moveJ(q_target, speed, accel); // blocking
double elapsed = std::chrono::duration<double, std::milli>(
Clock::now() - t0).count();
double err = maxError(q_target, rtde_r.getActualQ());
std::cout << std::fixed << std::setprecision(4)
<< " Done: t=" << elapsed << "ms, max_err=" << err << " rad\n";
}
// ── MoveL with logging ───────────────────────────────────────────────────────
void executeMoveL(RTDEControlInterface& rtde_c,
RTDEReceiveInterface& rtde_r,
const std::vector<double>& pose_target,
double speed = 0.25, double accel = 1.2) {
std::cout << "MoveL → [";
for (double p : pose_target) std::cout << std::setprecision(4) << p << ' ';
std::cout << "]\n";
auto t0 = Clock::now();
rtde_c.moveL(pose_target, speed, accel);
double elapsed = std::chrono::duration<double, std::milli>(
Clock::now() - t0).count();
double err = maxError(pose_target, rtde_r.getActualTCPPose());
std::cout << std::fixed << std::setprecision(4)
<< " Done: t=" << elapsed << "ms, max_err=" << err << " m/rad\n";
}
// ── ServoJ real-time loop ─────────────────────────────────────────────────────
void executeServoJ(RTDEControlInterface& rtde_c,
RTDEReceiveInterface& rtde_r,
double duration_s = 3.0,
const std::string& log_file = "servo_log.csv") {
const double DT = 0.002;
const double LOOKAHEAD = 0.1;
const int GAIN = 300;
RobotLogger logger(log_file);
auto q_start = rtde_r.getActualQ();
std::cout << "ServoJ demo start (" << duration_s << "s)...\n";
double t = 0.0;
int samples = 0;
double sum_err = 0.0, max_lat = 0.0;
auto t_begin = Clock::now();
while (t < duration_s) {
auto loop_start = Clock::now();
auto q_cmd = q_start;
q_cmd[0] += 0.2 * std::sin(2.0 * M_PI * t / duration_s);
rtde_c.servoJ(q_cmd, 0.0, 0.0, DT, LOOKAHEAD, GAIN);
auto after_servo = Clock::now();
double latency = std::chrono::duration<double, std::milli>(
after_servo - loop_start).count();
auto q_actual = rtde_r.getActualQ();
double err = maxError(q_cmd, q_actual);
double ts = std::chrono::duration<double, std::milli>(
after_servo - t_begin).count();
logger.log(ts, q_cmd, q_actual, err, latency);
sum_err += err;
max_lat = std::max(max_lat, latency);
++samples;
if (samples % 50 == 0)
std::cout << " t=" << std::fixed << std::setprecision(2) << t
<< "s | err=" << std::setprecision(4) << err
<< " rad | lat=" << std::setprecision(2) << latency << "ms\n";
double used = std::chrono::duration<double>(Clock::now() - loop_start).count();
if (used < DT)
std::this_thread::sleep_for(std::chrono::duration<double>(DT - used));
t += DT;
}
rtde_c.servoStop();
std::cout << "\n=== ServoJ Summary ===\n"
<< "Samples : " << samples << "\n"
<< "Avg err : " << std::fixed << std::setprecision(5)
<< (sum_err / samples) << " rad\n"
<< "Max lat : " << std::setprecision(2) << max_lat << " ms\n"
<< "Log : " << log_file << "\n";
}
// ── main ──────────────────────────────────────────────────────────────────────
int main(int argc, char* argv[]) {
const std::string ip = (argc > 1) ? argv[1] : "192.168.56.101";
std::cout << "Connecting to " << ip << " ...\n";
RTDEControlInterface rtde_c(ip);
RTDEReceiveInterface rtde_r(ip);
std::cout << "Connected.\n\n";
std::vector<double> q_home = {0.0, -M_PI/2, 0.0, -M_PI/2, 0.0, 0.0};
executeMoveJ(rtde_c, rtde_r, q_home, 0.5, 0.5); // low speed for first test
std::vector<double> q_pick = {M_PI/4, -M_PI/3, M_PI/2, -M_PI/4, M_PI/2, 0.0};
executeMoveJ(rtde_c, rtde_r, q_pick);
std::vector<double> pose_above = {0.300, -0.400, 0.500, 0.0, M_PI, 0.0};
executeMoveL(rtde_c, rtde_r, pose_above);
std::cout << "\nStarting servoJ demo...\n";
executeServoJ(rtde_c, rtde_r, 3.0, "servo_log.csv");
std::cout << "\nReturning home...\n";
executeMoveJ(rtde_c, rtde_r, q_home, 0.5, 0.5);
rtde_c.disconnect();
rtde_r.disconnect();
std::cout << "Done.\n";
return 0;
}
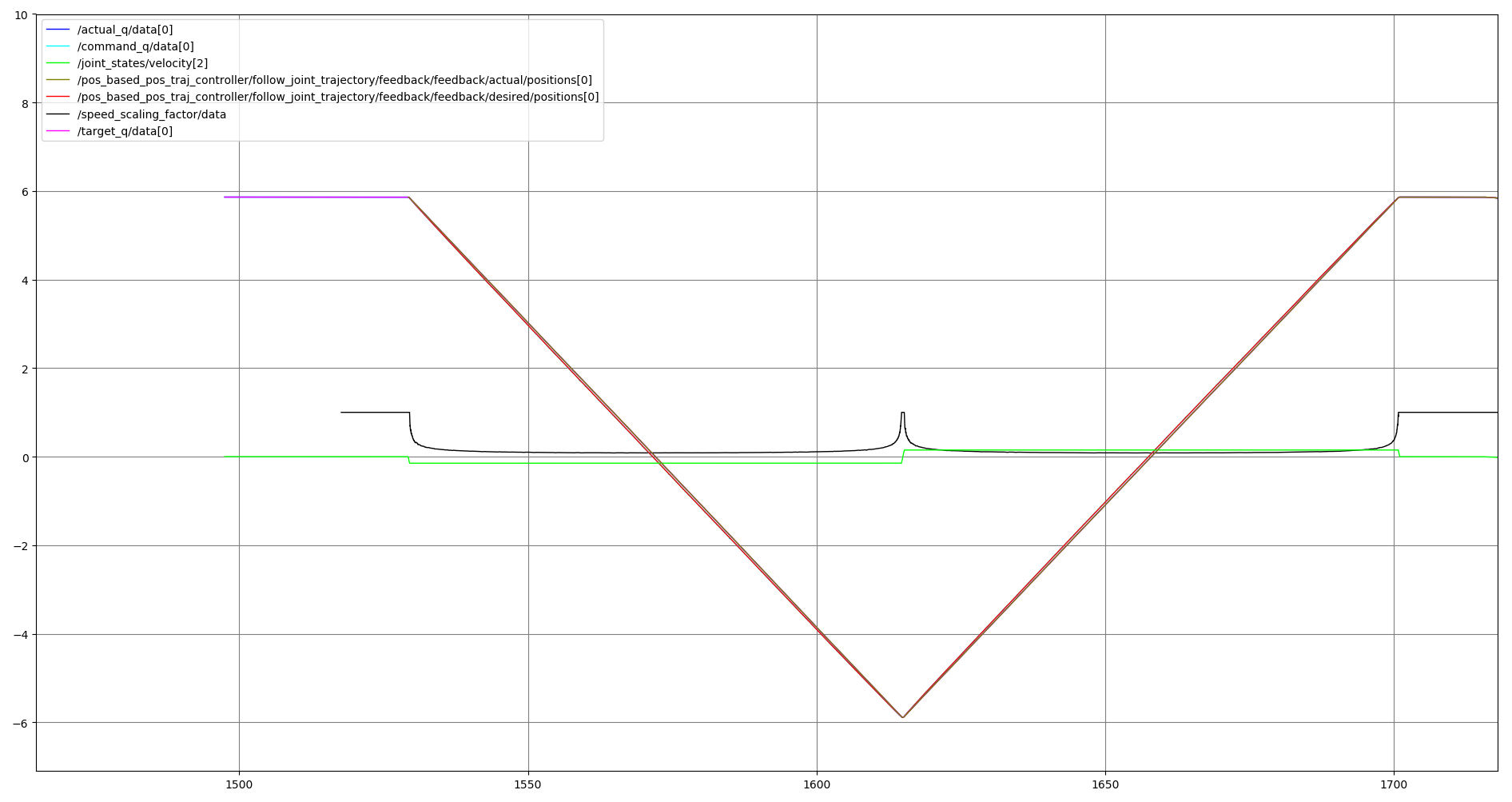
Step 7 — Analysing the tracking-error log
import csv
import statistics
with open("servo_log.csv") as f:
rows = list(csv.DictReader(f))
errors = [float(r["max_err_rad"]) for r in rows]
latencies = [float(r["latency_ms"]) for r in rows]
print(f"Samples : {len(rows)}")
print(f"Error : mean={statistics.mean(errors):.4f} "
f"max={max(errors):.4f} rad")
print(f"Latency : mean={statistics.mean(latencies):.2f} "
f"max={max(latencies):.2f} ms")
print()
print("Reference benchmarks:")
print(" servoJ error (good) : < 0.001 rad (~0.06°)")
print(" servoJ error (ok) : < 0.005 rad (~0.29°)")
print(" Loop latency target : < 2 ms (exact 500 Hz)")
Warning signs to look for in the log:
- Latency spikes > 5 ms → CPU preemption; consider
isolcpusor aPREEMPT_RTkernel - Error drifting upward over time → GAIN too low or LOOKAHEAD too long
- Error spikes at direction reversals → robot approaching a joint limit; re-check workspace
Step 8 — TCP frames and pose verification
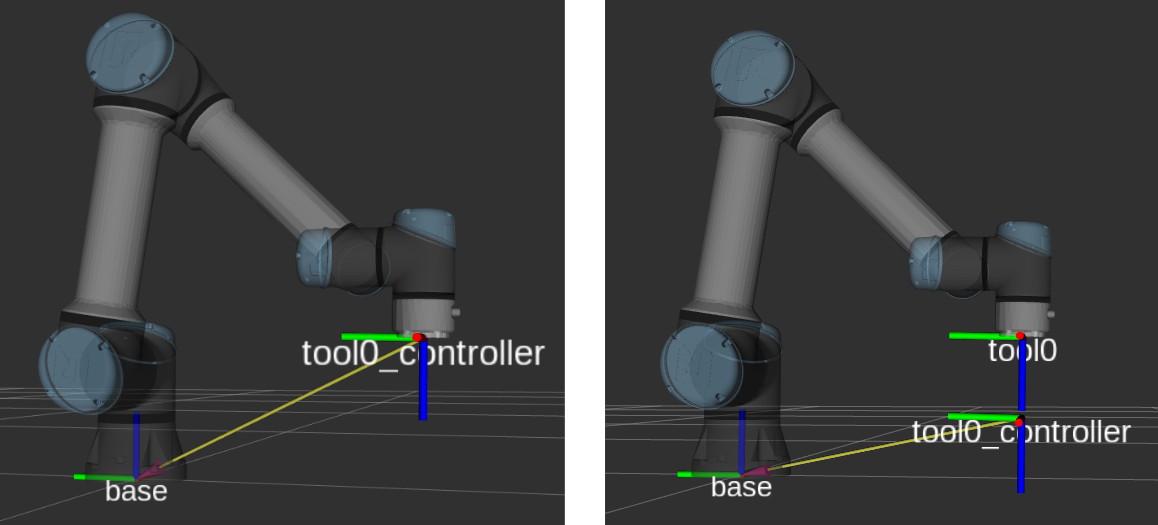
When calling moveL, it is essential to understand the TCP frame. UR robots use:
x, y, z— TCP position (metres) in the robot base framerx, ry, rz— rotation in axis-angle format (radians) — not Euler angles
# Check the active TCP frame
tcp = rtde_r.getActualTCPPose()
print(f"TCP: x={tcp[0]:.4f}m y={tcp[1]:.4f}m z={tcp[2]:.4f}m")
print(f" rx={tcp[3]:.4f} ry={tcp[4]:.4f} rz={tcp[5]:.4f} rad")
# Read joint torques — useful for detecting collisions
torques = rtde_r.getActualMoment()
print(f"Torques: {[f'{t:.1f}Nm' for t in torques]}")
Step 9 — Pre-deployment checklist for a real robot
Once code is stable on URSim, run through this checklist before touching hardware:
- Emergency stop within reach — no more than one step away
- Workspace clear — no people or obstacles within the arm's reach
- Speed slider at 10% on the Teach Pendant for first runs
- "External Control" program running on the Teach Pendant
- Joint limits verified — all
q_targetvalues within [-2π, 2π] - IP address updated — from
192.168.56.101to the real robot's IP - TCP offset correct — if using a gripper or tool, set TCP in Polyscope
- Move to home first — get a feel for speed and travel distance at 10%
# Run with the real robot
./ur_controller 192.168.1.100 # real robot IP
Series wrap-up
Across 15 articles we built a complete robot arm controller stack from foundations to production:
| Group | Articles | Content |
|---|---|---|
| Foundations | 1–5 | FK/IK, Jacobian, C++ setup, robot model, IK solver |
| Motion primitives | 6–12 | Frames, MoveJ, MoveL, MoveC, blending, S-curve profiles |
| Advanced | 13–14 | Jogging & servoJ, collision-aware planning (MoveIt2/OMPL) |
| Real robot | 15 | ros2_control + ur_rtde + logging (this article) |
The difference between a good robotics engineer and an average one isn't knowing more algorithms — it's the simulation-first mindset, enough logging to debug surprising hardware behaviour, and understanding every abstraction layer from a joint command down to metal. You now have all three.
Related Posts
- Collision-aware motion planning: MoveIt2 & OMPL — previous article: plan trajectories around obstacles
- Jogging and servo control: joint jog and TCP twist — servoJ in the context of jogging
- FK/IK and Jacobian: the mathematical foundation of robot arms — return to the fundamentals