You already know how to plan trajectories with MoveJ and MoveL. But sometimes you don't need a perfect plan — you just need to control the robot immediately, nudge it a little, see the response, then adjust. That's jogging and servo control.
Think of it like teaching someone to dance. Approach one: choreograph the entire routine before starting. Approach two: hold their hands and guide each movement in real time, adjusting as you go. MoveIt Servo is approach two.
What is MoveIt Servo?
MoveIt Servo is a package in the MoveIt 2 ecosystem (ROS 2), designed for real-time jogging/teleoperation. Instead of planning a path and then executing it, Servo accepts continuous commands from the user (or an algorithm) and converts them into joint commands immediately — typically at 100 Hz.
Key differences:
| MoveIt Planning | MoveIt Servo | |
|---|---|---|
| Purpose | Compute optimal path | Real-time control |
| Latency | Several seconds (planning) | <10 ms |
| Input | Start + Goal pose | Continuous velocity/pose command stream |
| Safety | Collision-free path guarantee | Velocity scaling when danger detected |
| Use when | Precise automation | Teleop, teaching, visual servoing |
MoveIt Servo accepts 3 input command types:
- JointJog — velocity for each individual joint
- TwistStamped — linear + angular velocity of the TCP (tool center point)
- PoseStamped — target pose for the TCP (pose tracking mode)
Core Architecture: Inverse Jacobian
The fundamental question: if the user wants the TCP to move in the X direction at 0.1 m/s, how fast must each joint rotate?
This is inverse velocity kinematics, solved using the Jacobian matrix:
v_tcp = J(q) × dq/dt
Where:
- v_tcp = [vx, vy, vz, ωx, ωy, ωz]ᵀ (6D TCP twist)
- J(q) = 6×N Jacobian matrix (N = DOF, typically 6)
- dq/dt = [dq₁/dt, ..., dqN/dt]ᵀ (joint velocities)
To invert: dq/dt = J⁺(q) × v_command
In practice, MoveIt Servo uses the damped least-squares (Levenberg-Marquardt pseudo-inverse) to avoid division-by-zero near singularities:
dq/dt = Jᵀ × (J×Jᵀ + λ²I)⁻¹ × v_command
The damping factor λ increases as the robot approaches a singularity — smoothly reducing speed rather than suddenly stopping.
Servo updates the Jacobian every control cycle (100 Hz), always using the robot's current kinematics.
Setting Up MoveIt Servo
Package structure
Create a ROS 2 package for the servo controller:
cd ~/ros2_ws/src
ros2 pkg create my_servo_demo \
--build-type ament_cmake \
--dependencies rclcpp moveit_servo geometry_msgs sensor_msgs
CMakeLists.txt
cmake_minimum_required(VERSION 3.16)
project(my_servo_demo)
set(CMAKE_CXX_STANDARD 17)
# Find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(moveit_servo REQUIRED)
find_package(moveit_ros_planning REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(control_msgs REQUIRED)
find_package(std_srvs REQUIRED)
# Library containing servo logic
add_library(servo_controller
src/servo_controller.cpp
)
ament_target_dependencies(servo_controller
rclcpp
moveit_servo
moveit_ros_planning
geometry_msgs
sensor_msgs
)
target_include_directories(servo_controller PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>
)
# Executable: C++ servo node
add_executable(servo_demo_node src/servo_demo_node.cpp)
target_link_libraries(servo_demo_node servo_controller)
ament_target_dependencies(servo_demo_node
rclcpp
moveit_servo
moveit_ros_planning_interface
std_srvs
)
# Install targets
install(TARGETS servo_controller servo_demo_node
DESTINATION lib/${PROJECT_NAME}
)
install(DIRECTORY launch config
DESTINATION share/${PROJECT_NAME}
)
ament_package()
package.xml
<?xml version="1.0"?>
<package format="3">
<name>my_servo_demo</name>
<version>0.1.0</version>
<description>MoveIt Servo demo package</description>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>moveit_servo</depend>
<depend>moveit_ros_planning</depend>
<depend>moveit_ros_planning_interface</depend>
<depend>geometry_msgs</depend>
<depend>sensor_msgs</depend>
<depend>control_msgs</depend>
<depend>std_srvs</depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
Configuring servo_params.yaml
The config file is the heart of MoveIt Servo. Create config/servo_params.yaml:
moveit_servo:
# --- Input topics ---
joint_command_in_topic: ~/delta_joint_cmds
cartesian_command_in_topic: ~/delta_twist_cmds
pose_command_in_topic: ~/target_pose
# --- Robot frames ---
planning_frame: base_link
ee_frame_name: tool0
# --- Safety thresholds ---
# Singularity: condition number of Jacobian
lower_singularity_threshold: 17.0 # start slowing
hard_stop_singularity_threshold: 30.0 # full stop
# Collision checking
check_collisions: true
collision_check_rate: 10.0
self_collision_proximity_threshold: 0.01 # meters
scene_collision_proximity_threshold: 0.02
# Joint limits
joint_limit_margin: 0.1 # radians before hard limit
# --- Speed limits ---
max_cartesian_speed: 2.0
max_joint_velocity_override: 2.0
# --- Servo loop rate ---
publish_period: 0.005 # seconds = 200 Hz
# --- Smoothing ---
use_smoothing: true
smoothing_filter_plugin_name: "online_signal_smoothing::ButterworthFilterPlugin"
# --- Timeout ---
incoming_command_timeout: 0.1
Launch File
Create launch/servo_demo.launch.py:
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
from moveit_configs_utils import MoveItConfigsBuilder
def generate_launch_description():
# Load MoveIt config (replace "my_robot" with your robot name)
moveit_config = (
MoveItConfigsBuilder("my_robot", package_name="my_robot_moveit_config")
.robot_description(file_path="config/my_robot.urdf.xacro")
.robot_description_semantic(file_path="config/my_robot.srdf")
.robot_description_kinematics(file_path="config/kinematics.yaml")
.to_moveit_configs()
)
servo_params_file = os.path.join(
get_package_share_directory("my_servo_demo"),
"config", "servo_params.yaml",
)
# MoveIt Servo Node
servo_node = Node(
package="moveit_servo",
executable="servo_node",
name="servo_node",
output="screen",
parameters=[
servo_params_file,
moveit_config.robot_description,
moveit_config.robot_description_semantic,
moveit_config.robot_description_kinematics,
],
)
# Move Group (required for planning scene + collision checking)
move_group_node = Node(
package="moveit_ros_move_group",
executable="move_group",
output="screen",
parameters=[moveit_config.to_dict()],
)
return LaunchDescription([move_group_node, servo_node])
C++ API: Using Servo Directly
MoveIt Servo offers both a ROS interface (via ServoNode) and a direct C++ interface. The C++ API provides tighter integration without the overhead of ROS messaging.
Initializing the Servo instance
// src/servo_controller.cpp
#include <moveit_servo/servo.hpp>
#include <moveit_servo/utils/common.hpp>
#include <rclcpp/rclcpp.hpp>
using namespace moveit_servo;
class ServoController {
public:
explicit ServoController(rclcpp::Node::SharedPtr node)
: node_(node)
{
// Load servo parameters
const std::string param_namespace = "moveit_servo";
const auto param_listener =
std::make_shared<const servo::ParamListener>(node_, param_namespace);
const servo::Params servo_params = param_listener->get_params();
// Create Planning Scene Monitor
planning_scene_monitor_ =
createPlanningSceneMonitor(node_, servo_params);
// Create Servo instance
servo_ = std::make_unique<Servo>(
node_, param_listener, planning_scene_monitor_
);
RCLCPP_INFO(node_->get_logger(), "ServoController initialized");
}
// Jog a single joint — e.g., rotate joint1 at 0.1 rad/s
void jogJoint(const std::string& joint_name, double velocity)
{
JointJogCommand cmd;
cmd.joint_names = {joint_name};
cmd.velocities = {velocity};
servo_->setCommandType(CommandType::JOINT_JOG);
KinematicState next_state = servo_->getNextJointState(cmd);
publishJointState(next_state);
}
// Cartesian twist jog — move TCP in specified frame
void jogTwist(const std::string& frame_id,
double vx, double vy, double vz,
double wx, double wy, double wz)
{
TwistCommand cmd;
cmd.frame_id = frame_id;
cmd.velocities = {vx, vy, vz, wx, wy, wz};
servo_->setCommandType(CommandType::TWIST);
KinematicState next_state = servo_->getNextJointState(cmd);
publishJointState(next_state);
}
// Pose tracking — move TCP to a target pose
void trackPose(const std::string& frame_id,
const Eigen::Isometry3d& target_pose)
{
PoseCommand cmd;
cmd.frame_id = frame_id;
cmd.pose = target_pose;
servo_->setCommandType(CommandType::POSE);
KinematicState next_state = servo_->getNextJointState(cmd);
publishJointState(next_state);
}
StatusCode getStatus() const { return servo_->getStatus(); }
private:
void publishJointState(const KinematicState& state)
{
// Forward to hardware controller
// e.g., trajectory_msgs/JointTrajectory or Float64MultiArray
if (servo_->getStatus() == StatusCode::NO_WARNING) {
RCLCPP_DEBUG(node_->get_logger(), "Publishing next joint state");
}
}
rclcpp::Node::SharedPtr node_;
planning_scene_monitor::PlanningSceneMonitorPtr planning_scene_monitor_;
std::unique_ptr<Servo> servo_;
};
Main control loop at 100 Hz
// src/servo_demo_node.cpp
#include "my_servo_demo/servo_controller.hpp"
#include <rclcpp/rclcpp.hpp>
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("servo_demo");
auto controller = std::make_shared<ServoController>(node);
rclcpp::Rate rate(100); // 100 Hz control loop
int cycle = 0;
RCLCPP_INFO(node->get_logger(), "Starting servo demo loop...");
while (rclcpp::ok()) {
if (cycle < 200) {
// Move forward: vx = 0.05 m/s in base_link frame
controller->jogTwist("base_link",
0.05, 0.0, 0.0,
0.0, 0.0, 0.0);
} else if (cycle < 400) {
// Move backward
controller->jogTwist("base_link",
-0.05, 0.0, 0.0,
0.0, 0.0, 0.0);
} else {
// Stop
controller->jogTwist("base_link",
0.0, 0.0, 0.0,
0.0, 0.0, 0.0);
cycle = 0;
}
// Check safety status
auto status = controller->getStatus();
if (status == StatusCode::HALT_FOR_COLLISION) {
RCLCPP_WARN(node->get_logger(), "Collision detected! Stopping.");
} else if (status == StatusCode::HALT_FOR_SINGULARITY) {
RCLCPP_WARN(node->get_logger(), "Near singularity! Slowing down.");
}
++cycle;
rclcpp::spin_some(node);
rate.sleep();
}
rclcpp::shutdown();
return 0;
}
Build with colcon
cd ~/ros2_ws
colcon build --packages-select my_servo_demo --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/setup.bash
Joint Jog: Per-Joint Control
Joint jog lets you rotate individual joints independently — useful when you need to adjust a specific joint without complex TCP motion.
Via ROS topic (easy testing)
# Terminal 1: Launch servo node
ros2 launch my_servo_demo servo_demo.launch.py
# Terminal 2: Publish JointJog message
ros2 topic pub --rate 10 /servo_node/delta_joint_cmds \
control_msgs/msg/JointJog "
header:
stamp:
sec: 0
nanosec: 0
frame_id: base_link
joint_names: ['joint1']
velocities: [0.2]
duration: 0.0
"
Via C++ API
JointJogCommand cmd;
cmd.joint_names = {"joint1", "joint2"};
cmd.velocities = {0.1, -0.05}; // rad/s each
servo_->setCommandType(CommandType::JOINT_JOG);
KinematicState result = servo_->getNextJointState(cmd);
Note: joint_names and velocities must have the same number of elements. Joints not listed will not move.
Cartesian Twist Jog: TCP Control
The most common mode in practice. The user specifies TCP velocity in 6 dimensions (3 linear + 3 angular); Servo computes joint velocities accordingly.
Frame awareness — the most important concept
When sending TwistCommand, you must specify frame_id because it determines the direction of motion:
// Case 1: Twist in BASE frame
// vx = 0.1 m/s means moving along X axis of base_link
TwistCommand cmd_base;
cmd_base.frame_id = "base_link";
cmd_base.velocities = {0.1, 0.0, 0.0, 0.0, 0.0, 0.0};
// Case 2: Twist in TOOL frame
// vx = 0.1 m/s means moving "forward" relative to the tool
TwistCommand cmd_tool;
cmd_tool.frame_id = "tool0";
cmd_tool.velocities = {0.1, 0.0, 0.0, 0.0, 0.0, 0.0};
The tool frame is usually preferred in practice because operators think in terms of "move toward the workpiece" rather than "move in global X direction."
Angular velocity [ωx, ωy, ωz]:
- ωz = 0.5 rad/s in tool0 → rotate tool around its own Z axis
- ωz = 0.5 rad/s in base_link → rotate tool around world Z axis
Safety: Singularity, Collision, and Joint Limits
1. Singularity Detection
Singularity occurs when the robot loses a degree of freedom (joints align). The Jacobian becomes ill-conditioned — a small TCP velocity requires very large joint velocities, which is mechanically dangerous.
MoveIt Servo monitors the condition number of the Jacobian:
condition_number = σ_max / σ_min
(σ = singular values of the Jacobian)
condition_number < lower_singularity_threshold→ normal operation- Between the two thresholds → scale down velocity (smooth warning)
condition_number > hard_stop_singularity_threshold→ full stop
In servo_params.yaml:
lower_singularity_threshold: 17.0 # start slowing down
hard_stop_singularity_threshold: 30.0 # hard stop
2. Collision Checking
Servo integrates with MoveIt Planning Scene for continuous collision checking:
check_collisions: true
collision_check_rate: 10.0 # Hz
scene_collision_proximity_threshold: 0.02 # safety margin from obstacles
self_collision_proximity_threshold: 0.01 # self-collision margin
As the robot approaches an obstacle, velocity is scaled down proportionally to the remaining clearance — not a sudden stop, but a smooth deceleration.
3. Joint Limit Enforcement
joint_limit_margin: 0.1 # radians before hard limit
When a joint is within joint_limit_margin of its hard limit, velocity in that direction is reduced to zero. This prevents mechanical over-extension.
Status codes
StatusCode status = servo_->getStatus();
switch (status) {
case StatusCode::NO_WARNING:
// Normal operation
break;
case StatusCode::WARNING:
// Continue but warning issued (near singularity/limit)
break;
case StatusCode::HALT_FOR_SINGULARITY:
RCLCPP_WARN(node->get_logger(), "Near singularity!");
break;
case StatusCode::HALT_FOR_COLLISION:
RCLCPP_ERROR(node->get_logger(), "Collision detected!");
break;
case StatusCode::JOINT_BOUND:
RCLCPP_WARN(node->get_logger(), "Joint limit reached!");
break;
}
Python: Fast Prototyping Script
Before writing full C++, Python lets you prototype very quickly. Here's a keyboard teleop script that jogs the robot via Cartesian twist:
#!/usr/bin/env python3
"""
Keyboard teleop for MoveIt Servo.
Use to prototype jog behavior before completing C++ implementation.
Keys:
W/S — TCP forward/back (X axis in tool frame)
A/D — TCP left/right (Y axis)
Q/E — TCP up/down (Z axis)
J/L — Yaw rotation (around Z)
I/K — Pitch rotation (around Y)
ESC — Exit
"""
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import TwistStamped
import threading
try:
from pynput import keyboard
HAS_PYNPUT = True
except ImportError:
HAS_PYNPUT = False
print("Install pynput: pip install pynput")
class KeyboardTeleopNode(Node):
"""Node that publishes TwistStamped based on keyboard input."""
LINEAR_SPEED = 0.05 # m/s — safe speed for beginners
ANGULAR_SPEED = 0.3 # rad/s
# Map key → (axis_index, sign)
KEY_MAP = {
'w': (0, +1.0), # linear X +
's': (0, -1.0), # linear X -
'a': (1, +1.0), # linear Y +
'd': (1, -1.0), # linear Y -
'q': (2, +1.0), # linear Z +
'e': (2, -1.0), # linear Z -
'j': (5, +1.0), # angular Z + (yaw)
'l': (5, -1.0), # angular Z -
'i': (4, +1.0), # angular Y + (pitch)
'k': (4, -1.0), # angular Y -
}
def __init__(self):
super().__init__('keyboard_teleop')
self.twist_pub = self.create_publisher(
TwistStamped,
'/servo_node/delta_twist_cmds',
10
)
self.velocity = [0.0] * 6 # [vx, vy, vz, wx, wy, wz]
self._lock = threading.Lock()
# Publish at 50 Hz
self.timer = self.create_timer(0.02, self._publish_twist)
self.get_logger().info(
"Keyboard teleop started. W/A/S/D/Q/E = linear, J/L/I/K = rotation"
)
def on_key_press(self, key):
try:
char = key.char.lower() if hasattr(key, 'char') else None
if char in self.KEY_MAP:
axis, sign = self.KEY_MAP[char]
with self._lock:
speed = (self.LINEAR_SPEED if axis < 3
else self.ANGULAR_SPEED)
self.velocity[axis] = sign * speed
except Exception:
pass
def on_key_release(self, key):
if key == keyboard.Key.esc:
rclpy.shutdown()
return False
try:
char = key.char.lower() if hasattr(key, 'char') else None
if char in self.KEY_MAP:
axis, _ = self.KEY_MAP[char]
with self._lock:
self.velocity[axis] = 0.0
except Exception:
pass
def _publish_twist(self):
msg = TwistStamped()
msg.header.stamp = self.get_clock().now().to_msg()
msg.header.frame_id = 'tool0' # Jog in tool frame
with self._lock:
v = self.velocity.copy()
msg.twist.linear.x = v[0]
msg.twist.linear.y = v[1]
msg.twist.linear.z = v[2]
msg.twist.angular.x = v[3]
msg.twist.angular.y = v[4]
msg.twist.angular.z = v[5]
self.twist_pub.publish(msg)
def main():
rclpy.init()
node = KeyboardTeleopNode()
if not HAS_PYNPUT:
print("Need pynput for keyboard input: pip install pynput")
rclpy.shutdown()
return
listener = keyboard.Listener(
on_press=node.on_key_press,
on_release=node.on_key_release,
)
listener.start()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
listener.stop()
node.destroy_node()
if rclpy.ok():
rclpy.shutdown()
if __name__ == '__main__':
main()
Running it
# Terminal 1: Make sure servo node is running
ros2 launch my_servo_demo servo_demo.launch.py
# Terminal 2: Run keyboard teleop
python3 scripts/keyboard_teleop.py
Why prototype in Python first?
- Write fast, no compilation needed
- Easy to try different speeds and frames
- Debug keyboard logic → when it works, port to C++
- C++ does the same publishing — just better performance for high-frequency control loops
Demo Video
Pose Tracking: Following a Target in Real Time
Beyond velocity commands, Servo also supports pose tracking — the robot automatically moves its TCP toward a continuously updated target pose (e.g., following an object detected by camera).
# Python script that continuously publishes a moving target pose
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import PoseStamped
import math
class PoseTracker(Node):
def __init__(self):
super().__init__('pose_tracker')
self.pub = self.create_publisher(
PoseStamped, '/servo_node/target_pose', 10
)
self.t = 0.0
self.create_timer(0.02, self.publish_pose) # 50 Hz
def publish_pose(self):
"""Move TCP in a circle — pose tracking demo."""
msg = PoseStamped()
msg.header.frame_id = 'base_link'
msg.header.stamp = self.get_clock().now().to_msg()
# TCP traces a circle with r=0.1m in the X-Y plane
msg.pose.position.x = 0.5 + 0.1 * math.cos(self.t)
msg.pose.position.y = 0.0 + 0.1 * math.sin(self.t)
msg.pose.position.z = 0.3
# Keep orientation vertical (pointing down)
msg.pose.orientation.x = 0.0
msg.pose.orientation.y = 0.707
msg.pose.orientation.z = 0.0
msg.pose.orientation.w = 0.707
self.pub.publish(msg)
self.t += 0.1
def main():
rclpy.init()
node = PoseTracker()
rclpy.spin(node)
rclpy.shutdown()
C++ equivalent:
PoseCommand cmd;
cmd.frame_id = "base_link";
// Target pose updated by vision system, AR marker, etc.
cmd.pose = Eigen::Isometry3d::Identity();
cmd.pose.translation() = Eigen::Vector3d(0.5, 0.0, 0.3);
servo_->setCommandType(CommandType::POSE);
KinematicState result = servo_->getNextJointState(cmd);
Real-world application: Visual servoing — camera detects a marker → continuously publishes pose → Servo drives TCP to the marker even as it moves.
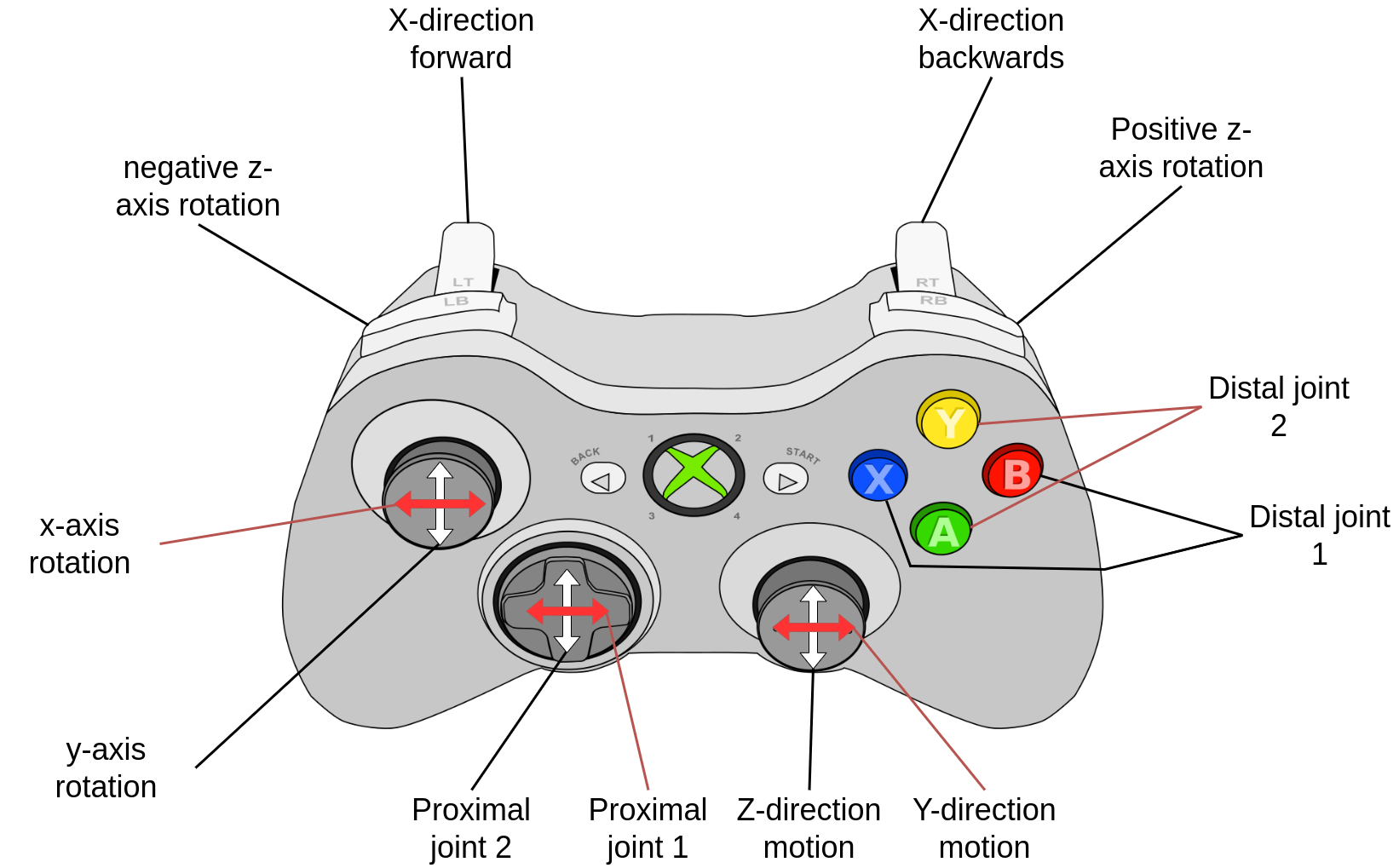
Xbox Controller Teleop
For more natural lab use, you can replace the keyboard with an Xbox controller:
# Install joy package
sudo apt install ros-humble-joy ros-humble-joy-linux
# Launch joy node
ros2 run joy joy_node
# Check what axes are available
ros2 topic echo /joy
Typical axes mapping for robot arm jogging:
- Left stick X/Y → TCP linear X/Y
- Right stick Y → TCP linear Z (up/down)
- Right stick X → TCP angular Z (yaw)
- Bumpers (LB/RB) → Joint jog for joint 1
Practical Workflow: From Prototype to Production
1. [Python] Write keyboard_teleop.py → test concept with Servo node
↓ Confirm behavior is correct
2. [Python] Add safety callbacks → monitor status codes
↓ Safety logic verified
3. [C++] Port to C++ API → better performance
↓ Test with real hardware
4. [C++] Integrate with broader system → visual servoing, task planning
When to use C++ instead of Python:
- Control loop >50 Hz (Python GIL limits performance)
- Direct integration with hardware driver (reduced overhead)
- Production system requiring deterministic timing
- Servo instance shared with other C++ components
Building and Running Everything
# Build workspace
cd ~/ros2_ws
colcon build --packages-select my_servo_demo --symlink-install
source install/setup.bash
# Launch with your robot simulator
ros2 launch my_servo_demo servo_demo.launch.py
# Test joint jog from terminal
ros2 topic pub --rate 10 /servo_node/delta_joint_cmds \
control_msgs/msg/JointJog \
"{joint_names: ['joint1'], velocities: [0.1]}"
# Test Cartesian jog
ros2 topic pub --rate 10 /servo_node/delta_twist_cmds \
geometry_msgs/msg/TwistStamped \
"{header: {frame_id: 'tool0'}, twist: {linear: {x: 0.05}}}"
Summary
In this article you learned:
- MoveIt Servo — what it is and how it differs from motion planning
- Inverse Jacobian — the math behind Cartesian twist jogging
- 3 input types: JointJog (per-joint), TwistStamped (Cartesian), PoseStamped (tracking)
- CMakeLists.txt and package.xml correctly structured for ament_cmake
- servo_params.yaml — configuring singularity, collision, joint limits
- C++ API — initializing Servo, setting command type, getting KinematicState
- Python teleop — rapid prototyping before committing to C++
- Frame awareness — why frame_id matters in TwistCommand
The next article in this series will bring everything together — FK, IK, MoveJ, MoveL, trajectory blending, velocity profiles, and Servo — into a complete motion planning pipeline for an industrial robot arm.