Beyond Parallel-Jaw Gripper
In previous posts of this series, I focused mainly on parallel-jaw grippers — two fingers that open/close. They're the most common because simple, cheap, and sufficient for many tasks (pick-and-place, bin picking).
But humans have 5 fingers with 20+ DOF, enabling delicate manipulation: rotating a ball, using tools, opening a bottle with one hand. Dexterous manipulation with multi-finger robot hands is the next frontier — and one of the hardest problems in robotics.
This post covers: hardware (Allegro, LEAP, Shadow Hand), core problems (in-hand manipulation, tool use), datasets (DexGraspNet), tactile sensing, and state-of-the-art methods.
See Tactile Sensing for Manipulation for deep dive on tactile sensors.

Hardware: Popular Robot Hands
Allegro Hand
Allegro Hand from Wonik Robotics is most popular in research:
- 16 DOF: 4 fingers x 4 joints each
- Torque-controlled: allows precise force control
- Price: ~15,000 USD
- Ecosystem: ROS 2 driver, MuJoCo/Isaac Sim models available
- Used by: Stanford IRIS, CMU, UC Berkeley
LEAP Hand
LEAP Hand from Carnegie Mellon is low-cost alternative:
- 16 DOF: similar to Allegro but uses Dynamixel servos
- Price: ~2,000 USD (7x cheaper than Allegro)
- Open-source: CAD files, firmware, software all public
- Anthropomorphic: design more human-like than Allegro
- Limitation: lower torque, no torque sensing built-in
Shadow Dexterous Hand
Shadow Hand is gold standard — most human-like:
- 24 DOF: 5 fingers + thumb opposition
- Tactile sensors: BioTac fingertips (optional)
- Price: 100,000+ USD
- Used by: OpenAI (Rubik's Cube), Google DeepMind
Comparison
| Criterion | Allegro | LEAP | Shadow |
|---|---|---|---|
| DOF | 16 | 16 | 24 |
| Price | ~15K USD | ~2K USD | ~100K+ USD |
| Torque sensing | Yes | No | Yes |
| Tactile | No (add-on) | No | BioTac (optional) |
| Open-source | No | Yes | No |
| Sim models | MuJoCo, Isaac | MuJoCo | MuJoCo, Isaac |
| Best for | Research balance | Education, budget | Top-tier research |
Core Problem: In-Hand Manipulation
In-Hand Object Rotation
In-hand rotation is the classic benchmark: robot hand holds object (cube, sphere) and rotates it to target orientation without dropping. Sounds simple but extremely hard:
- High-dimensional action space: 16+ joints simultaneously
- Unstable contacts: object can slip or drop anytime
- Sim-to-real gap: friction, deformation differs between simulation and reality
OpenAI's Rubik's Cube (2019) was a milestone: Shadow Hand solved Rubik's Cube after training RL in simulation with Automatic Domain Randomization (ADR). 13,000+ years simulated experience, transferred zero-shot to real robot.
Modern approach (2024-2026): RL in Isaac Lab with 4,096+ parallel environments. Unitree uses this for their dexterous hands, and Google DeepMind uses it for in-hand manipulation research.
Tool Use
Ability to use tools distinguishes human hands. Robot dexterous manipulation aims for:
- Hammer grasping and striking: hold hammer, strike target
- Screwdriver: hold and twist tool
- Scissors: coordinate 2 fingers for cutting
Current methods use keypoint-based representations: define important points on tool and hand, learn policy to align them. Stanford and UC Berkeley lead here.
DexGraspNet: Large-Scale Dexterous Grasp Dataset
DexGraspNet (Wang et al., 2023) is the largest dexterous grasping dataset:
- 1.32 million grasps for 5,355 objects from 133+ categories
- Generated via differentiable force closure optimization in Isaac Gym
- Each grasp validated by physics simulation
- For Shadow Hand (also LEAP hand version)
Using DexGraspNet
# Load DexGraspNet data (simplified)
import numpy as np
# Each object has ~200+ diverse grasps
grasp_data = np.load("dexgraspnet/core-bottle-1a7ba1f4c892e2da30711cdbdbc73e71.npy",
allow_pickle=True).item()
# Each grasp contains:
# - hand_pose: (22,) — wrist 6D + 16 joint angles
# - hand_qpos: (16,) — joint positions
# - target_qpos: (16,) — target joint positions for grasping
# - score: float — grasp quality (force closure based)
print(f"Number of grasps: {len(grasp_data['grasps'])}")
print(f"Object category: {grasp_data['category']}")
DexGraspNet 2.0
DexGraspNet 2.0 (2024) expands to:
- Cluttered scenes: 8,270 scenes with multiple objects
- 427 million grasp labels for LEAP hand
- Generative model to synthesize grasps for unseen objects
Tactile Sensing: "Touch" for Robots
Why Tactile Matters for Dexterous Manipulation?
Vision shows where object is, but tactile shows what it feels like: force, slip detection, surface texture. For dexterous manipulation, tactile is essential:
- Detect slip before object drops
- Estimate force to avoid breaking fragile objects
- Determine material (metal vs plastic vs fabric)
Types of Tactile Sensors
Vision-based (GelSight, DIGIT):
- Camera + elastomer: surface deformation -> image -> contact geometry
- High resolution (sub-mm), cheap (~300 USD/sensor)
- Medium force resolution
Capacitive/resistive (BioTac):
- Precise force, fast response
- Expensive (~1,000+ USD/fingertip)
- Low spatial resolution
Piezoelectric (tuxedo-labs):
- Extremely fast response (microsecond)
- Good for vibration/slip detection
- Limited spatial resolution
DIGIT Sensor for Research
DIGIT from Meta AI is most popular in research:
# Read DIGIT sensor data
import digit_interface
digit = digit_interface.Digit("D00123", resolution=(320, 240))
digit.connect()
# Get frame from sensor (contact geometry)
frame = digit.get_frame() # (240, 320, 3) RGB image
# Contact detection
is_contact = detect_contact(frame, baseline_frame)
# Force estimation (if calibrated)
force_estimate = estimate_force(frame, calibration_model)

State-of-the-Art Methods
RL + Sim-to-Real (Dominant Approach)
Most common method for dexterous manipulation:
- Setup in Isaac Lab: robot hand + object, reward function
- Train PPO/SAC with 4,096+ parallel environments
- Domain randomization: friction, mass, sensor noise, hand dimensions
- Deploy zero-shot to real robot
# Reward function for in-hand rotation (simplified)
def reward_function(env):
# Orientation error between current and target
rot_error = quaternion_distance(
env.object_quat, env.target_quat
)
# Bonus when achieving target
success_bonus = 10.0 if rot_error < 0.1 else 0.0
# Penalty for dropping
drop_penalty = -5.0 if env.object_pos[2] < 0.3 else 0.0
# Encourage contact between finger and object
fingertip_reward = -0.1 * fingertip_to_object_distance(env)
return -rot_error + success_bonus + drop_penalty + fingertip_reward
Diffusion Policy for Dexterous
2025-2026 trend: use Diffusion Policy instead of RL. Advantage: collect data via human teleoperation (more natural), no reward engineering.
Stanford IRIS showed Diffusion Policy can learn in-hand reorientation from 100 human demos, achieving comparable performance to RL after thousands of hours sim training.
Teacher-Student Framework
Effective approach: train teacher policy in sim with privileged information (ground truth object pose, contact forces), then distill to student policy using only real robot info (images, joints, tactile).
Teacher (sim, privileged):
Input: object pose + contact forces + joint pos
Output: action
Method: RL (PPO) with full state
Student (real-world compatible):
Input: images + joint pos + tactile
Output: action
Method: BC from teacher demonstrations
Challenges and Future Directions
Sim-to-Real Still the Biggest Problem
Contact physics in simulation still isn't 100% accurate. MuJoCo 3.x with convex optimization contact solver is much better, but deformable objects (fabric, rope) remain open challenge.
Hardware is Still a Bottleneck
Current robot hands are:
- Expensive: Shadow Hand 100K+ USD
- Fragile: break easily on impact
- Slow: response time slower than human hand
- Limited tactile: most lack integrated tactile sensors
LEAP Hand ($2K, open-source) is reducing barriers, but needs better durability and torque.
Bi-manual Dexterous
Combining 2 robot hands (32 DOF total) multiplies complexity exponentially. This is frontier of frontier — see Part 6 for more.
Resources
- DexGraspNet paper: arXiv:2210.02697
- DexGraspNet 2.0: arXiv:2410.23004
- LEAP Hand: https://leaphand.com/
- DIGIT sensor: https://digit.ml/
- Isaac Lab dexterous examples: github.com/isaac-sim/IsaacLab
Next in Series
- Part 6: Bimanual Manipulation: Teaching Robots to Use Both Arms — ALOHA, Mobile ALOHA, ACT for bimanual
- Part 7: Building Manipulation Systems with LeRobot — End-to-end deployment
Related Articles
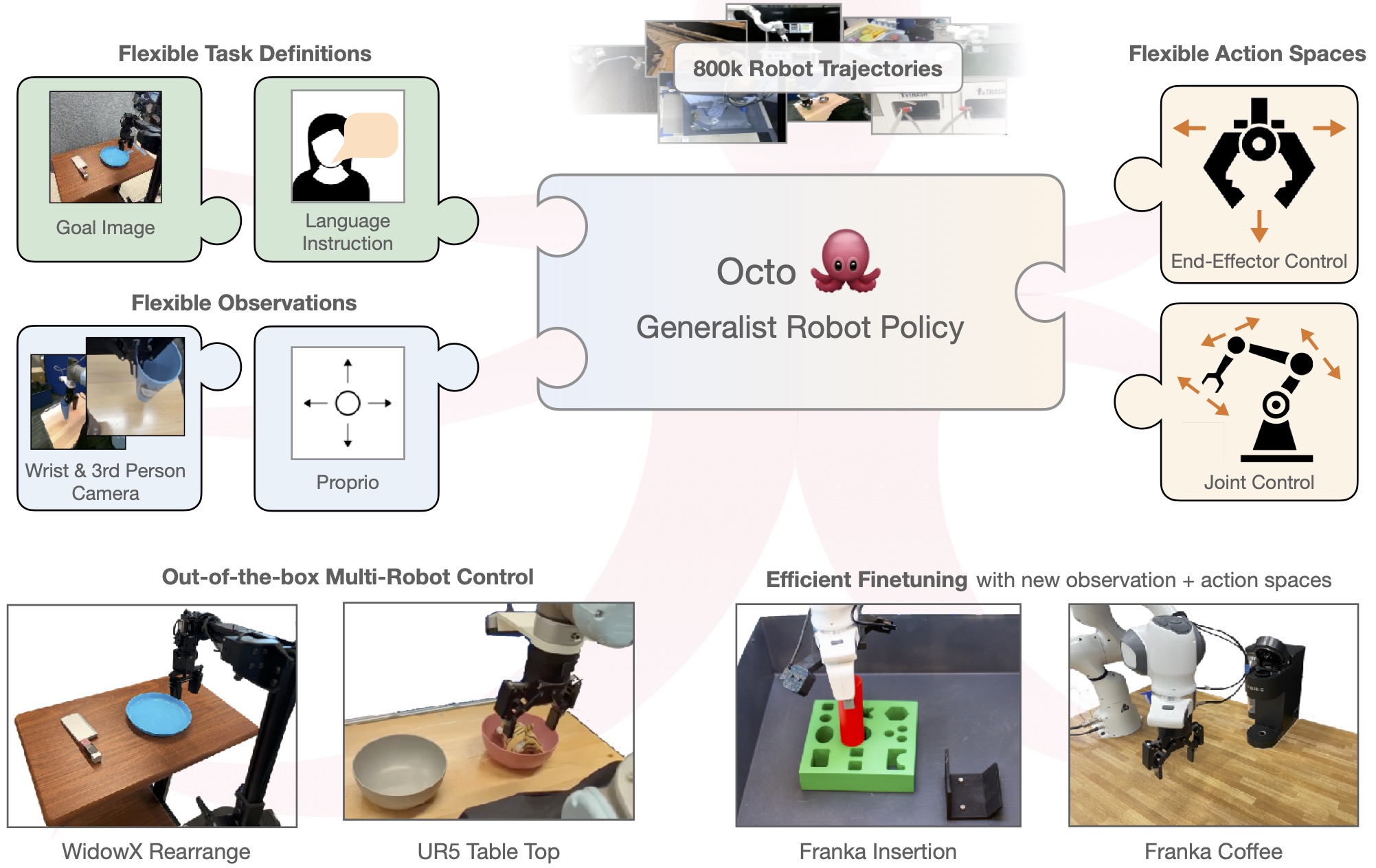
- VLA for Manipulation: RT-2, Octo, pi0 — Part 4 of this series
- Tactile Sensing for Manipulation — Deep dive on tactile sensors
- Robot Grasping 101: Analytical to Learning-Based — Part 1 of this series
- Sim-to-Real Transfer: Train in Simulation, Deploy in Reality — Domain randomization for dexterous