ROS 2 — Where to Start?
If you want to learn ROS 2 to build robots, this article is your starting point. We will go from installing ROS 2 Jazzy on Ubuntu 24.04, creating a workspace, writing your first publisher/subscriber node (both Python and C++), to building and running your own package. I have guided many engineers through ROS 2 beginnings, and experience shows: just follow each step carefully, you will master the fundamentals quickly.
If you don't yet know what ROS 2 is or why you should use ROS 2 instead of ROS 1, read Introduction to ROS 2: Next-Generation Robot Programming Framework first.
Which ROS 2 distro (as of June 2026)? Four common choices: Jazzy Jalisco (LTS, May 2024, Ubuntu 24.04) — recommended for beginners for stability + complete docs; Lyrical Luth (newest LTS, May 2026, Ubuntu 24.04) — newest but its ecosystem is still catching up; Kilted Kaiju (May 2025, non-LTS); Humble (LTS, 2022, Ubuntu 22.04, EOL May 2027) — still very popular. This series uses Jazzy. On Humble, just swap
jazzy→humbleand Ubuntu 24.04 → 22.04.
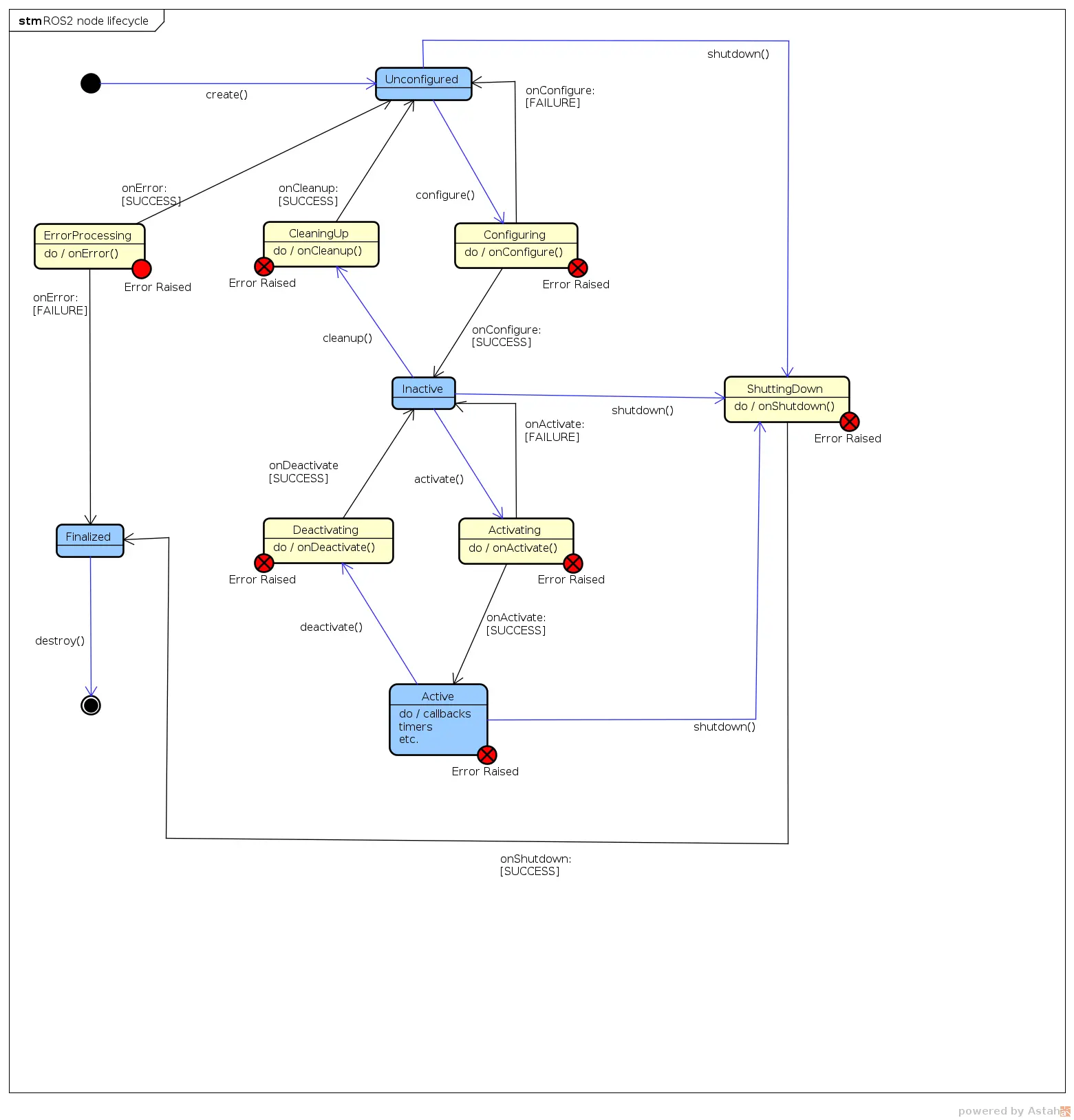
Series roadmap (7 parts): (1) Setup & First Node (this part) → (2) Topics, Services, Actions → (3) Parameters, Launch, Lifecycle → (4) TF2, URDF, RViz2 → (5) ros2_control & Hardware → (6) Nav2 → (7) Simulation, rosbag2, Debug.
Install ROS 2 Jazzy on Ubuntu 24.04
System Requirements
- OS: Ubuntu 24.04 LTS (Noble Numbat) — both desktop and server versions are fine
- RAM: Minimum 4GB, recommend 8GB or more
- Disk: At least 10GB free for desktop installation, 5GB for base installation
- CPU: x86_64 or ARM64 (Raspberry Pi 4 also works)
Step 1: Configure Locale
ROS 2 requires a locale with UTF-8 support:
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
# Verify
locale
Step 2: Add ROS 2 Repository
# Install dependencies
sudo apt install -y software-properties-common curl
sudo add-apt-repository universe
# Add GPG key
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \
-o /usr/share/keyrings/ros-archive-keyring.gpg
# Add repository
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] \
http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" \
| sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Step 3: Install ROS 2 Jazzy
sudo apt update
sudo apt upgrade -y
# Full desktop installation (includes RViz, Gazebo demos, rqt tools)
sudo apt install -y ros-jazzy-desktop
# Or minimal installation (libraries + CLI only, no GUI)
# sudo apt install -y ros-jazzy-ros-base
# Dev tools (compiler, cmake, colcon...) — needed for C++ builds
sudo apt install -y ros-dev-tools
Installation takes approximately 5-15 minutes depending on your internet speed.
Step 4: Install Build Tools
# colcon — ROS 2's main build tool
sudo apt install -y python3-colcon-common-extensions
# rosdep — dependency manager
# rosdep is included in ros-dev-tools above
sudo rosdep init
rosdep update
Step 5: Source Environment
# Add to .bashrc for automatic sourcing on terminal open
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
source ~/.bashrc
# Verify installation
ros2 --version
# Output: ros2 0.xx.x
Quick Test with Turtlesim
Before proceeding, make sure everything works:
# Terminal 1: Run turtlesim
ros2 run turtlesim turtlesim_node
# Terminal 2: Control turtle with keyboard
ros2 run turtlesim turtle_teleop_key
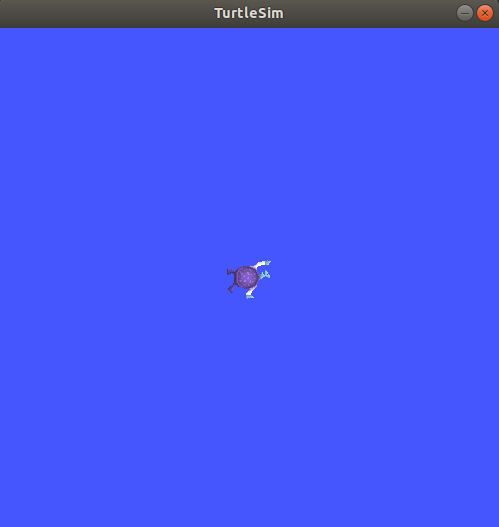
If you see a turtle window and can control it with arrow keys — congratulations, ROS 2 is ready!
Hands-on reference repo: dottantgal/ROS2_learning is the most complete C++ & Python example set for ROS 2 Jazzy — nodes, timers, topics, services, actions, TF2, all paired in both languages. Clone the
jazzybranch to follow along with this series.
Create ROS 2 Workspace
A workspace is where you keep all your source code. ROS 2 uses colcon as the build system (replacing ROS 1's catkin).
# Create workspace structure
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
# Build empty workspace (creates build, install, log directories)
colcon build
source install/setup.bash
Resulting structure:
~/ros2_ws/
├── build/ # Build artifacts
├── install/ # Installed packages (source this)
├── log/ # Build logs
└── src/ # Your source code
Important Tip: Always source workspace after build:
# Add to .bashrc
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
Create Your First Package
ROS 2 supports 2 package types: ament_python (Python) and ament_cmake (C++). This series uses both: this first node is in Python for accessibility, and from Part 3 onward you will see parallel C++ (rclcpp) and Python (rclpy) examples — real robots often run control nodes in C++ for performance.
cd ~/ros2_ws/src
# Create Python package
ros2 pkg create --build-type ament_python my_first_robot \
--dependencies rclpy std_msgs
# Result:
# my_first_robot/
# ├── my_first_robot/
# │ └── __init__.py
# ├── package.xml # Metadata + dependencies
# ├── setup.py # Python package config
# ├── setup.cfg # Entry points config
# ├── resource/
# │ └── my_first_robot
# └── test/
Write Your First Publisher Node
A node is the basic processing unit in ROS 2. Each node is a process that does one specific task. Let's write a node that simulates a temperature sensor, publishing data to the /temperature topic.
Create Publisher File
# ~/ros2_ws/src/my_first_robot/my_first_robot/temperature_publisher.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import Float32
import random
class TemperaturePublisher(Node):
"""Node simulating temperature sensor, publishes every second."""
def __init__(self):
super().__init__('temperature_publisher')
# Create publisher: message type, topic name, queue size
self.publisher_ = self.create_publisher(Float32, '/temperature', 10)
# Timer calls callback every 1 second
self.timer = self.create_timer(1.0, self.timer_callback)
# Base temperature
self.base_temp = 25.0
self.get_logger().info('Temperature publisher node started!')
def timer_callback(self):
msg = Float32()
# Simulate temperature fluctuation around 25°C
msg.data = self.base_temp + random.uniform(-2.0, 2.0)
self.publisher_.publish(msg)
self.get_logger().info(f'Published temperature: {msg.data:.1f}°C')
def main(args=None):
rclpy.init(args=args)
node = TemperaturePublisher()
try:
rclpy.spin(node) # Keep node running continuously
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Code Explanation
create_publisher(Float32, '/temperature', 10): Create publisher sendingFloat32messages to/temperaturetopic, queue size 10 (if subscriber is slow, keep at most 10 messages)create_timer(1.0, self.timer_callback): Calltimer_callbackevery 1 secondrclpy.spin(node): Keep node running, listen for callbacks — similar to event loop
Write a Subscriber Node
Now write a node that receives temperature data and processes it (e.g., warn when too hot):
# ~/ros2_ws/src/my_first_robot/my_first_robot/temperature_subscriber.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import Float32
class TemperatureSubscriber(Node):
"""Node receiving temperature and warning when exceeding threshold."""
def __init__(self):
super().__init__('temperature_subscriber')
# Create subscription
self.subscription = self.create_subscription(
Float32,
'/temperature',
self.listener_callback,
10
)
# Warning thresholds
self.warning_threshold = 26.5
self.critical_threshold = 27.5
self.get_logger().info('Temperature subscriber node started!')
def listener_callback(self, msg):
temp = msg.data
if temp >= self.critical_threshold:
self.get_logger().error(
f'CRITICAL: Temperature {temp:.1f}°C exceeds {self.critical_threshold}°C!'
)
elif temp >= self.warning_threshold:
self.get_logger().warn(
f'WARNING: Temperature {temp:.1f}°C above normal'
)
else:
self.get_logger().info(f'Temperature OK: {temp:.1f}°C')
def main(args=None):
rclpy.init(args=args)
node = TemperatureSubscriber()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Register Entry Points and Build
Update setup.py
For ROS 2 to know how to run the nodes, register them in setup.py:
# ~/ros2_ws/src/my_first_robot/setup.py
from setuptools import find_packages, setup
package_name = 'my_first_robot'
setup(
name=package_name,
version='0.1.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='your_name',
maintainer_email='[email protected]',
description='My first ROS 2 robot package',
license='Apache-2.0',
entry_points={
'console_scripts': [
'temp_pub = my_first_robot.temperature_publisher:main',
'temp_sub = my_first_robot.temperature_subscriber:main',
],
},
)
Build and Run
# Go to workspace root
cd ~/ros2_ws
# Build only your package (faster than building all)
colcon build --packages-select my_first_robot --symlink-install
# Source workspace again
source install/setup.bash
# Terminal 1: Run publisher
ros2 run my_first_robot temp_pub
# Terminal 2: Run subscriber
ros2 run my_first_robot temp_sub
The --symlink-install flag is very useful: it creates symlinks instead of copying files, so when you edit Python code, you don't need to rebuild (just restart the node).
You will see output like:
[INFO] [temperature_publisher]: Published temperature: 24.3°C
[INFO] [temperature_publisher]: Published temperature: 26.8°C
[INFO] [temperature_subscriber]: Temperature OK: 24.3°C
[WARN] [temperature_subscriber]: WARNING: Temperature 26.8°C above normal
Introspect with CLI Tools
ROS 2 CLI is powerful for debugging:
# List running nodes
ros2 node list
# /temperature_publisher
# /temperature_subscriber
# Get detailed node information
ros2 node info /temperature_publisher
# List all topics
ros2 topic list
# /temperature
# /parameter_events
# /rosout
# View topic data in real-time
ros2 topic echo /temperature
# Check publication rate
ros2 topic hz /temperature
# average rate: 1.000
# Check message type
ros2 topic type /temperature
# std_msgs/msg/Float32
# View message structure
ros2 interface show std_msgs/msg/Float32
# float32 data
Launch Files — Run Multiple Nodes at Once
Instead of opening many terminals, use a launch file:
# ~/ros2_ws/src/my_first_robot/launch/temperature_system.launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='my_first_robot',
executable='temp_pub',
name='temperature_publisher',
output='screen',
parameters=[{
'publish_rate': 1.0,
}],
),
Node(
package='my_first_robot',
executable='temp_sub',
name='temperature_subscriber',
output='screen',
),
])
For launch files to be found, add to setup.py:
import os
from glob import glob
# Add to data_files:
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
# Add this for launch files
(os.path.join('share', package_name, 'launch'),
glob(os.path.join('launch', '*launch.[pxy][yma]*'))),
],
Create launch directory and rebuild:
mkdir -p ~/ros2_ws/src/my_first_robot/launch
# Copy launch file there
cd ~/ros2_ws
colcon build --packages-select my_first_robot --symlink-install
source install/setup.bash
# Run entire system
ros2 launch my_first_robot temperature_system.launch.py

Visualize with rqt_graph
# Install rqt (if not in desktop installation)
sudo apt install -y ros-jazzy-rqt ros-jazzy-rqt-graph
# Open graph viewer
ros2 run rqt_graph rqt_graph
You will see a diagram: temperature_publisher node connected to temperature_subscriber via /temperature topic. This is a very effective debug method when systems become complex.
Summary and Next Steps
In this article, you have:
- Installed complete ROS 2 Jazzy on Ubuntu 24.04
- Created workspace and first Python package
- Written publisher and subscriber nodes communicating via topics
- Used colcon build, launch files, and CLI tools for debugging
This is the foundation for everything that follows. In Part 2, we will dive deep into ROS 2's 3 communication primitives: Topics, Services, and Actions — so you know when to use what when designing robot systems.
Related Articles
- Introduction to ROS 2: Next-Generation Robot Programming Framework — Architecture overview, ROS 1 vs ROS 2 comparison
- SLAM and Navigation for Autonomous Robots — Apply ROS 2 for robot mapping and movement
- Python for Robot Control — Essential Python fundamentals for ROS 2