ROS 2 là gì?
ROS 2 (Robot Operating System 2) là framework mã nguồn mở được thiết kế lại hoàn toàn từ ROS 1, nhắm đến việc hỗ trợ các ứng dụng robot thương mại và công nghiệp. Không giống như ROS 1 phụ thuộc vào một master node trung tâm (roscore), ROS 2 sử dụng DDS (Data Distribution Service) làm middleware giao tiếp, cho phép kiến trúc phân tán thực sự.
Hiểu đơn giản: nếu ROS 1 như một hệ thống điện thoại cần tổng đài trung tâm, thì ROS 2 như mạng internet — mỗi node có thể giao tiếp trực tiếp với nhau mà không cần "tổng đài".

Tại sao nên chuyển sang ROS 2?
1. Hỗ trợ Real-time
ROS 2 được xây dựng trên nền tảng DDS với khả năng QoS (Quality of Service) linh hoạt. Điều này cho phép bạn cấu hình độ tin cậy, độ trễ và băng thông cho từng topic riêng biệt — yếu tố quan trọng trong điều khiển robot công nghiệp.
Ví dụ thực tế: Khi điều khiển cánh tay robot hàn, bạn cần dữ liệu encoder đến trong vòng 1ms. Với ROS 2, bạn set QoS profile RELIABLE + KEEP_LAST(1) cho topic /joint_states để đảm bảo điều này. Trong khi đó, topic camera có thể dùng BEST_EFFORT vì mất vài frame không ảnh hưởng.
2. Bảo mật tích hợp
ROS 2 tích hợp SROS2 (Secure ROS 2) với mã hóa TLS/DTLS cho giao tiếp giữa các node. Trong môi trường nhà máy, đây là yêu cầu bắt buộc khi robot kết nối qua mạng nội bộ.
Thiết lập bảo mật cơ bản:
# Tạo keystore và certificates cho các node
ros2 security create_keystore ~/sros2_keystore
ros2 security create_enclave ~/sros2_keystore /my_robot/camera_node
ros2 security create_enclave ~/sros2_keystore /my_robot/motor_node
# Kích hoạt bảo mật khi chạy
export ROS_SECURITY_KEYSTORE=~/sros2_keystore
export ROS_SECURITY_ENABLE=true
export ROS_SECURITY_STRATEGY=Enforce
3. Đa nền tảng
ROS 2 hỗ trợ chính thức Ubuntu, Windows và macOS. Bạn có thể phát triển trên laptop Windows và deploy lên robot chạy Ubuntu ARM64 mà không cần thay đổi code. Đây là lợi thế lớn so với ROS 1 chỉ hỗ trợ tốt trên Ubuntu.
4. Lifecycle Node Management
ROS 2 giới thiệu Lifecycle Nodes — cho phép quản lý trạng thái của node (Unconfigured → Inactive → Active → Finalized). Điều này rất quan trọng trong sản xuất: bạn có thể cấu hình tất cả node trước, rồi activate đồng loạt khi robot sẵn sàng.
from rclpy.lifecycle import Node as LifecycleNode
class CameraNode(LifecycleNode):
def __init__(self):
super().__init__('camera_node')
def on_configure(self, state):
# Khởi tạo camera driver, load calibration
self.camera = cv2.VideoCapture(0)
self.get_logger().info('Camera configured')
return TransitionCallbackReturn.SUCCESS
def on_activate(self, state):
# Bắt đầu publish frames
self.timer = self.create_timer(0.033, self.publish_frame)
return TransitionCallbackReturn.SUCCESS
def on_deactivate(self, state):
# Dừng publish, giữ camera mở
self.destroy_timer(self.timer)
return TransitionCallbackReturn.SUCCESS
Kiến trúc cơ bản
Một hệ thống ROS 2 điển hình bao gồm 4 primitives giao tiếp:
| Primitive | Mô tả | Use case |
|---|---|---|
| Topic | Pub/Sub bất đồng bộ | Sensor data, robot state |
| Service | Request/Response đồng bộ | Get parameter, trigger action |
| Action | Goal + Feedback + Result | Navigation, arm movement |
| Parameter | Key-value runtime config | Tuning PID, thay đổi speed |
Graph concept
Mỗi node ROS 2 là một process độc lập. Chúng giao tiếp qua DDS network mà không cần biết nhau ở đâu — cùng máy hay khác máy đều hoạt động như nhau. Đây gọi là location transparency.
# Xem toàn bộ graph hiện tại
ros2 node list
ros2 topic list
ros2 topic echo /scan # Xem dữ liệu LiDAR real-time

Bắt đầu với ROS 2 Humble
ROS 2 Humble Hawksbill là phiên bản LTS (hỗ trợ đến 2027), phù hợp cho dự án production. Cài đặt trên Ubuntu 22.04:
# Thêm ROS 2 repository
sudo apt update && sudo apt install -y software-properties-common
sudo add-apt-repository universe
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
# Cài đặt
sudo apt update
sudo apt install ros-humble-desktop
# Source environment
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
Tạo workspace và package đầu tiên
# Tạo workspace
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
# Tạo Python package
ros2 pkg create --build-type ament_python my_robot_pkg --dependencies rclpy std_msgs
# Build
cd ~/ros2_ws
colcon build --symlink-install
# Source workspace
source install/setup.bash
Publisher node đơn giản
# my_robot_pkg/my_robot_pkg/sensor_publisher.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import Float32
class SensorPublisher(Node):
def __init__(self):
super().__init__('sensor_publisher')
self.publisher = self.create_publisher(Float32, '/temperature', 10)
self.timer = self.create_timer(1.0, self.timer_callback)
self.get_logger().info('Sensor publisher started')
def timer_callback(self):
msg = Float32()
msg.data = self.read_temperature()
self.publisher.publish(msg)
def read_temperature(self):
# Đọc từ sensor thực tế hoặc giả lập
return 25.5
def main():
rclpy.init()
node = SensorPublisher()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
Hệ sinh thái ROS 2
Sức mạnh thật sự của ROS 2 nằm ở hệ sinh thái packages:
- Nav2 (Navigation2): Navigation stack hoàn chỉnh cho AMR — SLAM, path planning, obstacle avoidance
- MoveIt2: Motion planning cho robot arm — inverse kinematics, collision detection, trajectory optimization
- ros2_control: Hardware abstraction layer — viết controller 1 lần, chạy trên mọi robot
- Gazebo / Isaac Sim: Simulation — test code trước khi chạy trên robot thật
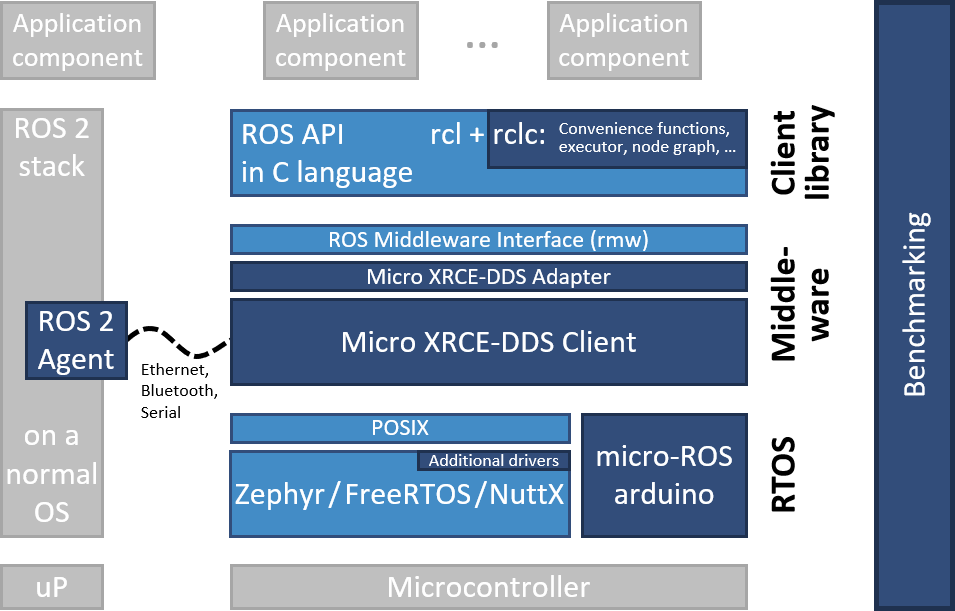
- micro-ROS: Chạy ROS 2 trên microcontroller (ESP32, STM32) — kết nối tầng embedded
So sánh ROS 1 vs ROS 2
| Tiêu chí | ROS 1 | ROS 2 |
|---|---|---|
| Middleware | Custom (TCPROS) | DDS (chuẩn công nghiệp) |
| Master node | Bắt buộc (roscore) |
Không cần |
| Real-time | Không hỗ trợ | QoS profiles |
| Bảo mật | Không có | SROS2 (TLS/DTLS) |
| Multi-robot | Khó (namespace) | Dễ (DDS domain) |
| OS | Ubuntu only | Ubuntu, Windows, macOS |
| Lifecycle | Không có | Lifecycle nodes |
Kết luận
ROS 2 đã trưởng thành đủ để sử dụng trong sản xuất. Với hệ sinh thái phong phú (Navigation2, MoveIt2, ros2_control), đây là lựa chọn hàng đầu cho bất kỳ dự án robot nào từ nghiên cứu đến thương mại.
Bước tiếp theo:
- Cài đặt ROS 2 Humble và thử chạy demo
turtlesim - Đọc bài SLAM và Navigation để hiểu cách robot tự hành
- Khám phá Micro-ROS để kết nối microcontroller với ROS 2
- Tìm hiểu lập trình điều khiển robot với Python cho ROS 2