Bạn muốn huấn luyện robot humanoid thao tác đồ vật, nhưng không có phòng lab triệu đô? Genie Sim 3.0 từ AGIBOT giải quyết đúng bài toán đó — một nền tảng simulation open-source xây trên NVIDIA Isaac Sim, cho phép tạo hàng nghìn scene huấn luyện chỉ bằng câu lệnh ngôn ngữ tự nhiên. Ra mắt tại CES 2026, Genie Sim 3.0 là nền tảng đầu tiên tích hợp trọn vẹn pipeline: từ tái tạo môi trường thực → sinh scene tự động → thu thập dữ liệu → huấn luyện → đánh giá closed-loop.
Trong bài viết này, chúng ta sẽ đi qua kiến trúc, cách cài đặt, pipeline huấn luyện, và kết quả sim-to-real đáng chú ý (R² = 0.924) của nền tảng này.
Tại sao cần Genie Sim 3.0?
Huấn luyện robot humanoid trong thế giới thực gặp ba rào cản lớn:
- Chi phí dữ liệu — Thu thập 500 episode thực tế cho một task đơn giản tốn hàng tuần nhân lực và thiết bị.
- Đa dạng scene — Robot cần generalize qua hàng nghìn biến thể (vị trí vật thể, ánh sáng, nhiễu sensor), không thể tạo thủ công.
- Vòng lặp đánh giá — Kiểm tra model mới trên robot thực rủi ro cao, chậm, và không reproducible.
Genie Sim 3.0 giải quyết cả ba: sinh dữ liệu synthetic quy mô lớn (10,000+ giờ), tạo scene đa dạng bằng LLM, và chạy đánh giá closed-loop hoàn toàn trong simulation.

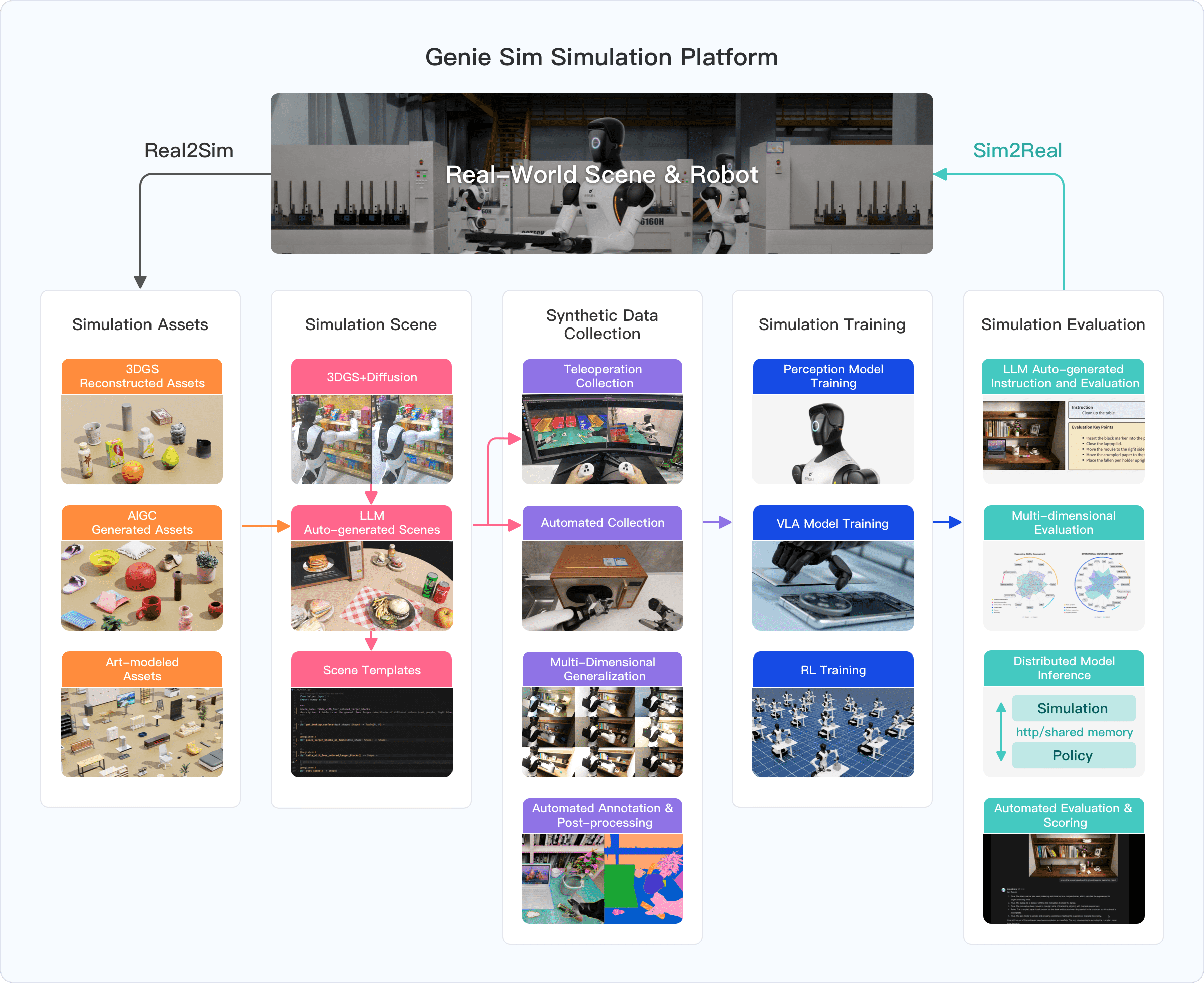
Kiến trúc tổng quan — 4 subsystem chính
Genie Sim 3.0 gồm bốn module tích hợp chặt chẽ:
1. Genie Sim Generator — Sinh scene bằng LLM
Đây là điểm khác biệt lớn nhất so với các platform truyền thống. Thay vì thiết kế scene thủ công trong editor, bạn mô tả bằng ngôn ngữ tự nhiên và LLM tự sinh scene.
Pipeline 4 bước:
- Intention Interpreter — Chuyển prompt ngôn ngữ tự nhiên thành JSON task spec bằng chain-of-thought reasoning.
- Assets Index — Hệ thống RAG với 5,140 object 3D trên 353 categories (retail, industry, catering, home, office). Dùng QWEN text-embedding-v4 (2048-dim) + ChromaDB cho semantic search.
- DSL Code Generator — Sinh Python code thực thi được theo scene language spec của Isaac Sim.
- Results Assembler — Khởi tạo hierarchical scene graph với OpenUSD Schema. Có thể sinh hàng nghìn scene đa dạng trong vài phút.
Ví dụ: bạn nói "Đặt 5 lon nước ngẫu nhiên trên bàn bếp, robot cần phân loại theo màu" → LLM tự tìm asset phù hợp, sinh code bố trí ngẫu nhiên, và tạo scene sẵn sàng huấn luyện.
2. Environment Reconstruction — Tái tạo môi trường thực
Module này chuyển không gian thực thành digital twin simulation-ready:
- 3D Gaussian Splatting (3DGS) cho photorealistic neural rendering.
- Camera pose optimization: SuperPoint + LightGlue (thay SIFT truyền thống) kết hợp LiDAR SLAM + bundle adjustment.
- Generative view extrapolation: Difix3D+ diffusion model bổ sung góc nhìn thiếu từ camera.
- Mesh reconstruction: PGSR (Planar-based Gaussian Splatting) cho geometry chính xác cao.
Điểm ấn tượng: chỉ cần video 60 giây quay quanh vật thể là đủ tạo asset simulation-ready. AGIBOT dùng MetaCam scanner (RGB + LiDAR 360° + RTK) cho capture quy mô lớn.
3. Data Collection Framework — Thu thập dữ liệu tự động
Hai chế độ thu thập:
- Teleoperation mode — Operator dùng PICO VR headset gửi target end-effector pose đến motion controller. Hệ thống log joint states, visual observations, object poses.
- Automated mode — cuRobo GPU-accelerated motion planner + LLM task generation + GraspNet grasp poses + waypoint filtering. Có recovery mechanism tự resume khi task fail.
4. Closed-loop Evaluation (Genie Sim Benchmark)
Đánh giá model trên 5 chiều:
| Dimension | Mô tả |
|---|---|
| Instruction following | Robot hiểu và thực hiện đúng lệnh |
| Spatial understanding | Nhận diện vị trí, khoảng cách, hướng |
| Manipulation skills | Grasping, placing, pushing chính xác |
| Robustness | Chịu được nhiễu ánh sáng, sensor, disturbance |
| Sim-to-real transfer | Hiệu suất chuyển từ sim sang thực |
Giao tiếp qua HTTP protocol giữa simulator và inference service. VLM tự đánh giá kết quả với evidence-based scoring.
Yêu cầu hệ thống
Genie Sim 3.0 chạy trên NVIDIA Isaac Sim 5.1.0, nên yêu cầu phần cứng khá cao:
| Thành phần | Tối thiểu | Khuyến nghị |
|---|---|---|
| OS | Ubuntu 22.04/24.04 | Ubuntu 22.04 LTS |
| GPU | NVIDIA RTX 4080 (16 GB VRAM) | RTX 5080 (48 GB VRAM) |
| CPU | Intel Core i7 Gen 7 / AMD Ryzen 5 | i9 X-series / Threadripper |
| RAM | 32 GB | 64 GB |
| Storage | 50 GB SSD | 1 TB NVMe SSD |
| Driver | NVIDIA 580.65.06+ | Mới nhất |
| Python | 3.11 | 3.11 |
Lưu ý quan trọng: GPU phải có RT Cores (dòng RTX). Các GPU compute-only như A100, H100 không được hỗ trợ vì Isaac Sim cần ray-tracing hardware.
Cài đặt từng bước
Bước 1: Cài NVIDIA Isaac Sim 5.1
# Cài NVIDIA Omniverse Launcher
# Download từ: https://developer.nvidia.com/omniverse
# Sau đó cài Isaac Sim 5.1.0 qua Launcher
# Hoặc dùng pip (headless mode)
pip install isaacsim==5.1.0
Bước 2: Clone Genie Sim repo
git clone https://github.com/AgibotTech/genie_sim.git
cd genie_sim
Bước 3: Cài dependencies
# Tạo conda environment
conda create -n geniesim python=3.11 -y
conda activate geniesim
# Cài requirements
pip install -r requirements.txt
Bước 4: Download assets
Assets được host trên ModelScope và HuggingFace:
# Download 3D assets (5,140 objects)
python scripts/download_assets.py --source modelscope
# Hoặc từ HuggingFace
python scripts/download_assets.py --source huggingface
Bước 5: Verify cài đặt
# Chạy demo scene
python scripts/run_demo.py --scene kitchen_basic
Nếu thấy cửa sổ Isaac Sim hiện scene bếp với robot, bạn đã cài thành công.

Pipeline huấn luyện
Genie Sim 3.0 hỗ trợ hai approach huấn luyện chính:
Approach 1: Imitation Learning với VLA Models
Đây là focus chính của paper. Workflow:
1. Sinh scene + thu thập demo:
# Sinh 1000 scene variations cho task "pick and place"
python -m geniesim.generator \
--prompt "Robot picks colored cans from table and sorts by color" \
--num_scenes 1000
# Thu thập demo tự động
python -m data_collection.auto_collect \
--task pick_sort_color \
--episodes 1500 \
--robot agibot_g1
2. Fine-tune VLA model:
Genie Sim hỗ trợ nhiều VLA model: pi-0.5, GO-1, UniVLA, RDT, X-VLA, GR00T-N1.6. Ví dụ fine-tune pi-0.5:
# Export dataset sang format tương thích
python -m data_collection.export \
--format pi05 \
--output ./datasets/pick_sort
# Fine-tune (cần multi-GPU)
python -m geniesim.train \
--model pi-0.5 \
--dataset ./datasets/pick_sort \
--episodes 1500 \
--output ./checkpoints/pi05_pick_sort
3. Đánh giá closed-loop:
# Khởi động inference server
python -m geniesim.inference_server \
--model ./checkpoints/pi05_pick_sort \
--port 8080
# Chạy benchmark
python -m geniesim.benchmark \
--server http://localhost:8080 \
--suite instruction_following \
--trials 250
Approach 2: Reinforcement Learning với RLinf
Cho các task cần precision cao (micro-manipulation), Genie Sim tích hợp RLinf — framework RL parallel:
# Training RL policy cho grasping
python -m geniesim.rl_train \
--task precise_grasp \
--algo ppo \
--num_envs 4096 \
--physics_freq 1000 \
--total_steps 10_000_000
Điểm mạnh của RLinf:
- Physics engine chạy 1000 Hz (decouple khỏi rendering).
- Standardized Gym interface — tương thích với ecosystem RL hiện tại.
- Thiết kế như RL post-training trên VLA pre-training: VLA cho "generalized understanding", RL cho "precise micromanipulation".
Kết quả: Sim-to-Real Transfer đáng chú ý
Đây là phần ấn tượng nhất. AGIBOT test trên 4 task với robot Agibot G1:
| Task | Real (200 eps) | Real (500 eps) | Sim (500 eps) | Sim (1500 eps) |
|---|---|---|---|---|
| Select Color | 0.53 | 0.73 | 0.60 | 0.85 |
| Recognize Size | 0.56 | 0.75 | 0.63 | 0.94 |
| Grasp Targets | 0.39 | 0.58 | 0.33 | 0.71 |
| Organize Objects | 0.30 | 0.40 | 0.35 | 0.60 |
Phát hiện quan trọng: Model huấn luyện trên 1500 episode synthetic đạt success rate cao nhất — vượt cả model huấn luyện trên 500 episode thực tế ở mọi task. Zero-shot transfer, không fine-tune thêm trên real data.
Correlation giữa sim và real: R² = 0.924, slope ≈ 1.045 (gần 1:1). Nghĩa là hiệu suất trong simulation gần như dự đoán chính xác hiệu suất ngoài đời thực.
Validation: 32 conditions × 50 trials (real) / 250 trials (sim) — con số đủ lớn để tin cậy thống kê.
So sánh với các nền tảng khác
| Nền tảng | Assets | Tasks | Sim-to-Real | Open-source |
|---|---|---|---|---|
| Meta-World | Hạn chế | Multi-task RL | Không test | Có |
| RoboCasa | Kitchen-focused | 100+ | Hạn chế | Có |
| BEHAVIOR-1K | 9,000+ objects | 1,000 activities | Hạn chế | Có |
| Isaac Lab | Tùy biến | Gym tasks | Tốt | Có |
| Genie Sim 3.0 | 5,140 objects | 200+ loco-manip | R²=0.924 | Có |
Điểm mạnh riêng của Genie Sim: LLM-driven scene generation (không cần thiết kế thủ công), pipeline end-to-end tích hợp, và validation sim-to-real nghiêm ngặt nhất trong các platform open-source hiện tại.
Nếu bạn đã quen với Isaac Lab, Genie Sim 3.0 bổ sung thêm tầng abstraction cao hơn: bạn không cần code scene — chỉ cần mô tả bằng ngôn ngữ tự nhiên.
Hạn chế cần biết
- Chỉ hỗ trợ robot AGIBOT G1/G2 — Chưa support robot từ hãng khác (Unitree, Boston Dynamics). Nếu bạn dùng robot khác, cần tự adapt URDF/MJCF.
- Yêu cầu GPU RTX — Không chạy được trên A100/H100 (compute-only). Với beginner chưa có RTX 4080+, cloud GPU (Lambda, Vast.ai) là lựa chọn.
- Documentation còn mỏng — README trên GitHub khá sparse, redirect sang user guide riêng. Community còn nhỏ so với MuJoCo hay Isaac Lab.
- Scene generation phụ thuộc LLM quality — Kết quả scene phụ thuộc chất lượng prompt và LLM backend. Scene phức tạp có thể cần iterate nhiều lần.
Workflow gợi ý cho người mới
Nếu bạn mới bắt đầu với robot simulation, đây là thứ tự hợp lý:
- Nắm vững Isaac Sim cơ bản — Đọc tổng quan về simulation cho robotics trước.
- Học RL foundations — Hiểu reward shaping, policy gradient qua RL basics cho robotics.
- Cài Genie Sim 3.0 — Theo hướng dẫn ở trên.
- Bắt đầu với task đơn giản — Pick-and-place single object, 200 episodes, fine-tune model nhỏ.
- Scale dần — Tăng scene diversity, thêm task complexity, test sim-to-real nếu có hardware.
Tài nguyên
- Paper: Genie Sim 3.0: A High-Fidelity Comprehensive Simulation Platform for Humanoid Robot — AGIBOT, 2026
- GitHub: github.com/AgibotTech/genie_sim
- User Guide: agibot-world.com/sim-evaluation/docs
- License: Mozilla Public License 2.0 (core modules)
Kết luận
Genie Sim 3.0 đánh dấu bước tiến quan trọng: lần đầu tiên, một pipeline hoàn chỉnh từ scene generation → data collection → training → evaluation được open-source với kết quả sim-to-real đã validated (R² = 0.924). Dù còn hạn chế về robot support và community size, nó mở ra hướng đi rõ ràng — dùng LLM để democratize việc tạo dữ liệu huấn luyện robot, thay vì phụ thuộc vào phòng lab đắt đỏ.
Với robotics engineer Việt Nam, đây là cơ hội tiếp cận công nghệ simulation tiên tiến mà trước đây chỉ có tại các lab lớn. Nếu bạn quan tâm đến sim-to-real transfer hay đang tìm hiểu domain randomization, Genie Sim 3.0 là nền tảng đáng thử nghiệm.